Ինչու է անհրաժեշտ մեխանիկական էներգիա: Ինչ է պոտենցիալ էներգիան: Էներգիայի ձևերն ու տեսակները
1.2.3 Ուժերի աշխատանքը մեխանիկայում, էներգիա. Մեխանիկայի մեջ էներգիայի պահպանման օրենքը
Աշխատանքմշտական ուժ Ֆ, երբ մարմինը շարժվում է թարգմանաբար և ուղղագիծ, երբ մարմինն անցնում է S ճանապարհը, մեծությունը կոչվում է.
Զոռով կատարված աշխատանք Ֆվերջնական ճանապարհին ս, հավասար է ուղու առանձին անվերջ փոքր հատվածների տարրական աշխատանքի գումարին. այս գումարը կրճատվում է մինչև ինտեգրալը.
Ուժ Ֆ,նյութական կետի վրա գործելը կոչվում է պահպանողական, կամ ներուժ, եթե աշխատում է Ա, որն իրականացվում է այս ուժով, երբ կետը մեկ կամայական դիրքից մյուսը տեղափոխելիս, կախված չէ այն հետագծից, որով տեղի է ունեցել այս շարժումը: Հետևաբար, երբ նյութական կետը շարժվում է փակ հետագծով, պահպանողական ուժի աշխատանքը նույնականորեն հավասար է զրոյի: Այսպիսով, պահպանողական ուժերը կարող են սահմանվել երկու ձևով.
1) որպես ուժ, որի աշխատանքը կախված չէ այն ճանապարհից, որի երկայնքով մասնիկը շարժվում է մի դիրքից մյուսը.
2) որպես ուժ, որի աշխատանքը փակ ճանապարհով զրո է:
Պահպանողական ուժերի օրինակներ են համընդհանուր ձգողության ուժերը, առաձգականության ուժը և լիցքավորված մարմինների միջև էլեկտրաստատիկ փոխազդեցության ուժը։
Բոլոր ուժերը, որոնք չեն բավարարում պահպանողականության պայմանը, կոչվում են ոչ պահպանողական . Նման ուժերի բնորոշ օրինակ է շփման սահող ուժերը։ Սահող շփման ուժը միշտ ուղղված է շարժման ուղղությանը հակառակ ուղղությամբ, ուստի cosα = -1: Հետևաբար, փակ հետագծի երկայնքով սահող շփման ուժի աշխատանքը միշտ բացասական է և երբեք հավասար չէ զրոյի։
Ուժով կատարված աշխատանքի արագությունը բնութագրելու համար ներկայացվում է ուժ հասկացությունը։ Ուժ Նուժ Ֆֆիզիկական մեծություն է, որը թվայինորեն հավասար է ժամանակի միավորի վրա այս ուժի կատարած աշխատանքին.
Որտեղ v - ուժի կիրառման կետի արագությունը.
Մեխանիկայի մեջ կա էներգիայի երկու տեսակ՝ կինետիկ և պոտենցիալ։ Կինետիկ էներգիամարմինները էներգիա են անվանում Ե Կ , որը նրա մեխանիկական շարժման չափումն է և չափվում է այն աշխատանքով, որը մարմինը կարող է կատարել, երբ այն դանդաղում է մինչև լրիվ կանգառը։ Եկեք գտնենք պինդ մարմնի կինետիկ էներգիայի արտահայտությունը IN,զանգված ունենալով Տև առաջ շարժվելով արագությամբ v.
Թող մարմինը INդանդաղում է ինչ-որ ուժի ազդեցության տակ Ֆ(ընդհանուր դեպքում՝ փոփոխական) և ուղու կարճ հատվածում դս կատարում է տարրական աշխատանք դ Ա= - Ֆ τ դս. Նյուտոնի երկրորդ օրենքի համաձայն. Ֆ τ = mdv/ dt Հետևաբար, dA = - մ (dv/ dt) դս = - մ (դս/ dt) dv = - մ v dv. Մարմնի կողմից կատարված աշխատանք INմինչև այն ամբողջովին դադարի
Այս բանաձևը վավեր է նյութական կետի կինետիկ էներգիայի համար: Ցանկացած մեխանիկական համակարգ կարելի է համարել որպես նյութական կետերի համակարգ։ Հետևաբար կինետիկ էներգիան Ե Կ մեխանիկական համակարգը հավասար է բոլորի կինետիկ էներգիաների գումարին ՊԱյս համակարգը ձևավորող նյութական կետերը.
|
Ե Դեպի = ∑ Ե ես = ∑մ ես v ես 2 /2 |
Որտեղ մ ես , v ես- զանգված և արագություն եսնյութական կետ. Այսպիսով, համակարգի կինետիկ էներգիան ամբողջությամբ որոշվում է զանգվածների և շարժման արագությունների արժեքներով: դրանում ներառված նյութական կետերը. Դա կախված չէ նրանից, թե ինչպես են դիտարկվող համակարգի մասերը ձեռք են բերել այս արագության արժեքները: Համառոտ այս կարևոր եզրակացությունը կարելի է ձևակերպել հետևյալ կերպ. համակարգի կինետիկ էներգիան նրա շարժման վիճակի ֆունկցիան է։
Եթե նյութական կետերի կամ մարմինների համակարգի վրա գործում են պահպանողական (պոտենցիալ) ուժեր, ապա կարելի է ներմուծել այս համակարգի պոտենցիալ էներգիայի հայեցակարգը։ Իրականում պահպանողական ուժերի կատարած աշխատանքը կախված չէ նրանից, թե ինչպես է իրականացվել այս շարժումը։ Աշխատանք Ա 1-2 համակարգը տարածության մեկ կետից տեղափոխելիս այն ամբողջությամբ որոշվում է սկզբնական և վերջնական համակարգի գտնվելու վայրերը . Սա կարող է արտահայտվել ձևով
|
Ա 1-2 = Եպ 1 – Եպ 2 |
Որտեղ Եպ - համակարգի վիճակի որոշակի ֆունկցիա՝ կախված միայն համակարգի բոլոր նյութական կետերի կոորդինատներից։ Այս ֆունկցիան կոչվում է պոտենցիալ էներգիահամակարգեր. Սրանից հետևում է, որ մեխանիկական համակարգի վրա գործող պահպանողական ուժերի կատարած աշխատանքը հավասար է այս համակարգի պոտենցիալ էներգիայի նվազմանը։ Սահմանումից հետևում է, որ կամայական վիճակում գտնվող համակարգի պոտենցիալ էներգիան հավասար է պահպանողական ուժերի կատարած աշխատանքին, երբ համակարգը մի վիճակից մյուսը տեղափոխում են՝ ըստ խնդրի պայմանների։
Օրինակ, ձգողականության աշխատանքը կախված է միայն ճանապարհի մեկնարկային և վերջնակետերի բարձրությունների տարբերությունից։ Մարմնի ծանրության ուժը կիրառվում է նրա ծանրության կենտրոնի վրա։ Հետևաբար, մարմնի ցանկացած շարժման ընթացքում ծանրության կողմից կատարված աշխատանքը հավասար է այս ուժի արտադրյալին և նրա ծանրության կենտրոնի սկզբնական և վերջնական դիրքերի բարձրությունների տարբերությանը։ Հետևում է, որ մարմնի ծանրության կենտրոնի փակ հետագծի երկայնքով ծանրության աշխատանքը հավասար է զրոյի, այսինքն՝ ծանրության ուժն իսկապես պահպանողական է։ Բարձրության վրա բարձրացված մարմնի պոտենցիալ էներգիա ՀԵրկրի մակերեւույթից բարձր հավասար է
Եկեք գտնենք առաձգականորեն դեֆորմացված մարմնի պոտենցիալ էներգիան: Էլաստիկ ուժ Ֆ ynp, ինչպես հայտնի է փորձից, համաչափ է դեֆորմացիայի մեծությանը X, այսինքն. Ֆ ynp , = - կXՈրտեղ կ - մարմնի առաձգական հատկությունները բնութագրող առաձգականության գործակիցը, իսկ մինուս նշանը ցույց է տալիս, որ առաձգականության ուժն ուղղված է դեֆորմացման ուղղությամբ հակառակ ուղղությամբ. առաձգական դեֆորմացված մարմինը ձգտում է վերականգնել իր սկզբնական ձևն ու չափը:
Բռնի ուժով կատարված տարրական աշխատանք Ֆ ynpքանակով մարմնի դեֆորմացիայի անսահման փոքր փոփոխությամբ dxհավասար է դA = (Ֆ ynp dx) = - kxdx. Այս ուժի աշխատանքը մարմնի դեֆորմացիայի վերջավոր փոփոխության ժամանակ, օրինակ՝ այն չդեֆորմացված վիճակից տեղափոխելիս ( X=0) դեֆորմացմանը համապատասխան վիճակի X, հավասար է
Լի մեխանիկական էներգիահամակարգերը անվանում են քանակ Ե, հավասար է այս համակարգի կինետիկ և պոտենցիալ էներգիաների գումարին.
|
Ե = Ե Կ + Ե n . |
Համակարգի ընդհանուր մեխանիկական էներգիան նրա վիճակի ֆունկցիան է, քանի որ այն կախված է միայն համակարգի բոլոր փոքր մասերի (նյութական կետերի) կոորդինատներից, արագություններից և զանգվածներից։
Եկեք գտնենք այն պայմանը, որը մարմինների համակարգը պետք է բավարարի, որպեսզի դրա ընդհանուր մեխանիկական էներգիան ժամանակի ընթացքում չփոխվի։ Եթե v- արագություն ես- զանգվածով նյութական կետը Տ Եվ ապա նրա կինետիկ էներգիան Ե Դեպի ես = մ ես v ես 2 /2. Այս էներգիայի փոփոխությունը կարճ ժամանակահատվածում dt, կապված արագության փոփոխության հետ v, վրա dv ես = ա ես dt (Ա ես- դիտարկվող նյութական կետի արագացում), հավասար է
|
dE Դեպի ես = մ ես /2 [(dv ես , v ես ) + (v ես , dv ես ,)] = մ ես (ա ես dt,v ես ,) = (մ ես Ա ես , v տ դտ) =(մ ես Ա ես , դոկտ ես ) |
Որտեղ դոկտ ես = v ես dt- շառավղով վեկտորի աճ r ես , նյութական կետ. Նյուտոնի երկրորդ օրենքի համաձայն մ ես Ա ես = Ֆ ես + զ ես , Որտեղ Ֆ եսԵվ զ ես - հետևանք, համապատասխանաբար, պահպանողական և ոչ պահպանողական ուժերի վրա, որոնք գործում են ես- yu նյութական կետ. Ահա թե ինչու
Այս հավասարման աջ կողմի առաջին գումարը ներկայացնում է ընդհանուր աշխատանքը dA, իրականացվել է բոլոր պահպանողական ուժերի կողմից որոշակի ժամանակահատվածում dt. Այս աշխատանքը հավասարազոր է նույն ժամանակի կորստի dt համակարգի պոտենցիալ էներգիա
Որտեղ E= Ե Կ + Ե n - համակարգի ընդհանուր մեխանիկական էներգիան.
Եթե փոխազդեցության ներքին ուժերը պահպանողական են, իսկ բոլոր արտաքին ուժերը անշարժ են և պահպանողական, ապա մարմինների (նյութական կետերի) նման համակարգը կոչվում է. պահպանողական համակարգ,. Նման համակարգի համար dA = դԵ = 0 Եվ
|
Ե = Ե Կ + Ե Պ= const, |
այսինքն պահպանողական համակարգի ընդհանուր մեխանիկական էներգիան ժամանակի ընթացքում չի փոխվում։ Այս օրենքը կոչվում է մեխանիկական էներգիայի պահպանման օրենքը. Նա արդար է փակ պահպանողական համակարգ,այսինքն՝ համակարգ, որի վրա արտաքին ուժերը չեն գործում, իսկ ներքին բոլոր ուժերը պահպանողական են։
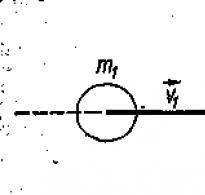
Դիտարկենք մեխանիկական էներգիայի պահպանման օրենքի կիրառումը երկու մարմինների բացարձակ առաձգական ուղիղ կենտրոնական ազդեցության հաշվարկում։ Բացարձակ առաձգականկոչվում է այնպիսի ազդեցություն, որի արդյունքում տեղի չի ունենում բախվող մարմինների համակարգի մեխանիկական էներգիայի փոխակերպում էներգիայի այլ տեսակների։ Թողեք զանգվածներով երկու բացարձակ առաձգական գնդակներ մ 1 Եվ մ 2 ազդեցությունից առաջ (Նկար - 1.32, Ա)արագությամբ առաջ շարժվելով v 1 Եվ v 2 , ուղղված նույն ուղղությամբ իրենց կենտրոնների գծով և v 1 > v 2 . Մենք պետք է գտնենք գնդակների արագությունը u 1 Եվ u 2 հարվածից հետո (Նկար - 1.32, բ).
|
|
|
|
Նկար - 1.32 |
|


Հարվածի ընթացքում բախվող մարմինների համակարգը կարելի է փակված համարել։ Ուստի այս խնդիրը լուծելու համար մենք կարող ենք օգտագործել մեխանիկական էներգիայի և իմպուլսի պահպանման օրենքները։ Մինչ հարվածը և դրա ավարտից հետո բախվող մարմինները չեն դեֆորմացվում, այսինքն՝ այս երկու վիճակներում համակարգի պոտենցիալ էներգիան կարելի է համարել նույնը և հավասար զրոյի։ Հետո մեխանիկական էներգիայի պահպանման օրենքից ունենք
Վերջին երկու հավասարումների համատեղ լուծումը տալիս է
|
u 1 = / (մ 1 +մ 2 ), u 2 = / (մ 1 +մ 2 ) |
այսինքն՝ առաձգական բախումից հետո մարմինները շարժվում են իրենց ուրույն արագությամբ և կինետիկ էներգիայով։ Ե 1 Եվ Ե 2 համապատասխանաբար.
Մարմինների համակարգը կոչվում է ցրող, եթե նրա մեխանիկական էներգիան աստիճանաբար նվազում է էներգիայի այլ (ոչ մեխանիկական) ձևերի վերածվելու պատճառով։ Այս գործընթացը կոչվում է գործընթաց ցրում(ցրում) էներգիա. Որպես օրինակ, դիտարկենք էներգիայի ցրումը բացարձակ անառաձգականերկու աստիճանաբար շարժվող մարմինների անմիջական կենտրոնական ազդեցությունը:
Լիովին ոչ առաձգական բախման ժամանակ, ցրում էներգիա.Փոփոխություն ∆ Ե Բախվող մարմինների համակարգի ընդհանուր մեխանիկական էներգիան հավասար է նրանց կինետիկ էներգիայի փոփոխությանը
Փոխակերպումներից հետո ցրված էներգիան կազմում է.
|
∆Ե =- մ 1 մ 2 (v 1 – v 2 ) 2 /2(մ 1 + մ 2 ) |
Եթե մարմինը կարող է մեխանիկական աշխատանք կատարել, ուրեմն ունի մեխանիկական էներգիա Ե(J). Կամ, եթե արտաքին ուժը իսկապես գործում է մարմնի վրա ազդելով, նրա էներգիան փոխվում է:
Մեխանիկական էներգիայի երկու տեսակ կա՝ կինետիկ և պոտենցիալ։
Կինետիկ էներգիա -շարժվող մարմինների էներգիա.
Որտեղ v(մ/վ) – արագության մոդուլ, մ – մարմնի զանգված:
Պոտենցիալ էներգիա- փոխազդող մարմինների էներգիա.
Մեխանիկայի մեջ պոտենցիալ էներգիայի օրինակներ.
Մարմինը բարձրանում է գետնից. E = մգժ
որտեղ h-ը զրոյական մակարդակից (կամ հետագծի ամենացածր կետից) որոշված բարձրությունն է։ Հետագծի ձևը կարևոր չէ, կարևոր են միայն սկզբնական և վերջնական բարձրությունները:
Էլաստիկ դեֆորմացված մարմին։Դեֆորմացիա, որը որոշվում է չդեֆորմացված մարմնի դիրքից (աղբյուր, լար և այլն):
Առաձգական մարմինների պոտենցիալ էներգիա. , որտեղ k-ն զսպանակի կոշտությունն է; x-ը նրա դեֆորմացիան է:
Էներգիան կարող է փոխանցվել մի մարմնից մյուսը, ինչպես նաև փոխակերպվել մի տեսակից մյուսը։
![]() - Ընդհանուր մեխանիկական էներգիա.
- Ընդհանուր մեխանիկական էներգիա.
Էներգիայի պահպանման օրենքը: Վ փակվածամբողջ մարմնի համակարգ էներգիան չի փոխվումմարմինների այս համակարգի ներսում ցանկացած փոխազդեցության ժամանակ:
|
Փակ համակարգ կազմող և գրավիտացիոն և առաձգական ուժերի միջոցով միմյանց հետ փոխազդող մարմինների կինետիկ և պոտենցիալ էներգիայի գումարը մնում է անփոփոխ։
2.
Տրանսֆորմատոր. Գործողության սկզբունքը. Սարք. Փոխակերպման գործակիցը. Էլեկտրաէներգիայի փոխանցում.
AC փոխակերպում, որի դեպքում լարումը մի քանի անգամ ավելանում կամ նվազում է գործնականում ոչ  էներգիայի կորուստն իրականացվում է տրանսֆորմատորների միջոցով:
էներգիայի կորուստն իրականացվում է տրանսֆորմատորների միջոցով:
Տրանսֆորմատոր- սարք, որն օգտագործվում է փոփոխական հոսանքի լարումը բարձրացնելու կամ նվազեցնելու համար:
Տրանսֆորմատորներն առաջին անգամ օգտագործվել են 1878 թվականին։ Ռուս գիտնական Պ.Ն.
Ամենապարզ տրանսֆորմատորը բաղկացած է երկու կծիկից: Վերք ընդհանուր պողպատե միջուկի վրա: Մեկ կծիկ միանում է աղբյուրին փոփոխականԼարման. Այս կծիկը կոչվում է առաջնայինոլորուն), իսկ մյուս կծիկից (կոչ երկրորդականոլորուն) հեռացնել փոփոխական լարումը դրա հետագա փոխանցման համար:
Առաջնային ոլորուն փոփոխվող հոսանքը ստեղծում է փոփոխական մագնիսական դաշտ: Պողպատե միջուկի շնորհիվ նույն միջուկի վրա փաթաթված երկրորդական ոլորուն ներթափանցում է գրեթե նույնը. փոփոխականդաշտը որպես առաջնային։
Որովհետև ամեն ինչ շրջվում էներթափանցված են նույն փոփոխական մագնիսական հոսքը, շնորհիվ էլեկտրամագնիսական ինդուկցիայի երևույթի ամեն շրջադարձառաջացած նույն լարումը. Հետևաբար, առաջնային և երկրորդային ոլորունների 𝑈 1 և 2 լարումների հարաբերակցությունը հավասար է դրանցում պտույտների քանակի հարաբերակցությանը.
Տրանսֆորմատորի կողմից լարման փոփոխությունը բնութագրում է փոխակերպման հարաբերակցությունը
Փոխակերպման հարաբերակցությունը - արժեք, որը հավասար է տրանսֆորմատորի առաջնային և երկրորդային ոլորուններում լարումների հարաբերակցությանը.
Ակտիվացումտրանսֆորմատոր - տրանսֆորմատոր, որը մեծացնում է լարումը (Ավելացվող տրանսֆորմատորում երկրորդական ոլորուն պտույտների քանակը պետք է լինի ավելի մեծ, քան առաջնային ոլորման պտույտների թիվը, այսինքն.<1.
Դեպի ներքևտրանսֆորմատոր - տրանսֆորմատոր, որը նվազեցնում է լարումը (նվազեցնող տրանսֆորմատորում երկրորդական ոլորուն պտույտների թիվը պետք է պակաս լինի առաջնային ոլորման պտույտների քանակից, այսինքն՝ k>1.
Էլեկտրական էներգիայի փոխանցումը էլեկտրակայաններից խոշոր քաղաքներ կամ արդյունաբերական կենտրոններ հազարավոր կիլոմետր հեռավորությունների վրա բարդ գիտատեխնիկական խնդիր է: Լարերի տաքացման պատճառով կորուստները նվազեցնելու համար անհրաժեշտ է նվազեցնել հոսանքի հոսքը հաղորդման գծում և, հետևաբար, բարձրացնել լարումը: Սովորաբար էլեկտրահաղորդման գծերը կառուցվում են 400–500 կՎ լարման համար, իսկ գծերն օգտագործում են եռաֆազ հոսանք 50 Հց հաճախականությամբ։
Տոմս թիվ 12
Պասկալի օրենքը. Արքիմեդի օրենքը. Նավարկության պայմանները հեռ.
Պասկալի օրենքի ձևակերպում
Հեղուկի կամ գազի վրա արտադրվող ճնշումը փոխանցվում է ցանկացած կետի նույնը բոլոր ուղղություններով:Այս հայտարարությունը բացատրվում է հեղուկների և գազերի մասնիկների շարժունակությամբ բոլոր ուղղություններով։
Պասկալի հիդրոստատիկայի օրենքի հիման վրա գործում են տարբեր հիդրավլիկ սարքեր՝ արգելակային համակարգեր, մամլիչներ և այլն։
Արքիմեդի օրենքըՀեղուկների և գազերի ստատիկ օրենքն է, ըստ որի հեղուկի (կամ գազի) մեջ ընկղմված մարմնի վրա գործում է լողացող ուժ (Արքիմեդի ուժ), որը հավասար է այս մարմնի կողմից տեղաշարժված հեղուկի (կամ գազի) քաշին։ .

F A = ρgV,
Որտեղ ρ
- հեղուկի (գազի) խտությունը,
է - ձգողության արագացում,
Վ - ընկղմված մարմնի ծավալը (կամ մարմնի այն մասի ծավալը, որը ընկղմված է հեղուկի (կամ գազի) մեջ):
Արքիմեդի ուժն ուղղված է միշտ հակառակ ձգողականության. Այն հավասար է զրոյի, եթե հեղուկի մեջ ընկղմված մարմինը խիտ է, որի ամբողջ հիմքը սեղմված է դեպի ներքև։
Պետք է հիշել, որ Անկշիռ վիճակում Արքիմեդի օրենքը չի գործում.
Մեխանիկայի մեջ կա էներգիայի երկու տեսակ՝ կինետիկ և պոտենցիալ։ Կինետիկ էներգիաանվանել ցանկացած ազատ շարժվող մարմնի մեխանիկական էներգիան և չափել այն աշխատանքով, որը մարմինը կարող է անել, երբ այն դանդաղում է մինչև լրիվ կանգ առնելը:
Թող մարմինը IN, շարժվելով արագությամբ v, սկսում է փոխազդել մեկ այլ մարմնի հետ ՀԵՏև միևնույն ժամանակ դանդաղում է: Հետեւաբար մարմինը INազդում է մարմնի վրա ՀԵՏորոշ ուժով Ֆև ճանապարհի տարրական հատվածում դսաշխատում է
Նյուտոնի երրորդ օրենքի համաձայն՝ B մարմնի վրա միաժամանակ գործում է ուժ -Ֆ, որի շոշափող բաղադրիչը -Ֆ տառաջացնում է մարմնի արագության թվային արժեքի փոփոխություն. Նյուտոնի երկրորդ օրենքի համաձայն

Հետևաբար,
Օրգանիզմի կատարած աշխատանքը մինչև լրիվ կանգ առնելը հետևյալն է.

Այսպիսով, թարգմանաբար շարժվող մարմնի կինետիկ էներգիան հավասար է այս մարմնի զանգվածի արտադրյալի կեսին իր արագության քառակուսիով.
 (3.7)
(3.7)
Բանաձևից (3.7) պարզ է դառնում, որ մարմնի կինետիկ էներգիան չի կարող բացասական լինել ( Ek ≥ 0).
Եթե համակարգը բաղկացած է nաստիճանաբար շարժվող մարմինները, ապա այն կանգնեցնելու համար անհրաժեշտ է արգելակել այդ մարմիններից յուրաքանչյուրը։ Հետևաբար, մեխանիկական համակարգի ընդհանուր կինետիկ էներգիան հավասար է դրանում ընդգրկված բոլոր մարմինների կինետիկ էներգիաների գումարին.
 (3.8)
(3.8)
Բանաձևից (3.8) պարզ է դառնում, որ Եկկախված է միայն դրա մեջ ներառված մարմինների զանգվածների մեծությունից և շարժման արագությունից։ Այս դեպքում նշանակություն չունի, թե որքան է մարմնի զանգվածը m iարագություն է ձեռք բերել ν i. Այլ կերպ ասած, Համակարգի կինետիկ էներգիան նրա շարժման վիճակի ֆունկցիան է.
Արագություններ ν iզգալիորեն կախված է տեղեկատու համակարգի ընտրությունից: (3.7) և (3.8) բանաձևերը դուրս բերելիս ենթադրվում էր, որ շարժումը դիտարկվում է իներցիոն հղման համակարգում, քանի որ. հակառակ դեպքում Նյուտոնի օրենքները չէին կարող կիրառվել։ Այնուամենայնիվ, տարբեր իներցիոն հղման համակարգերում միմյանց համեմատ շարժվող արագությունը ν i եսհամակարգի րդ մարմինը և, հետևաբար, նրա Էկիև ամբողջ համակարգի կինետիկ էներգիան նույնը չի լինի: Այսպիսով, համակարգի կինետիկ էներգիան կախված է հղման շրջանակի ընտրությունից, այսինքն. քանակն է ազգական.
Պոտենցիալ էներգիա- սա մարմինների համակարգի մեխանիկական էներգիան է, որը որոշվում է նրանց հարաբերական դիրքով և նրանց միջև փոխազդեցության ուժերի բնույթով:
Թվային առումով, համակարգի պոտենցիալ էներգիան իր տվյալ դիրքում հավասար է այն աշխատանքին, որը կկատարեն համակարգի վրա ազդող ուժերը, երբ համակարգը տեղափոխում են այս դիրքից այն դիրքը, որտեղ պոտենցիալ էներգիան պայմանականորեն ենթադրվում է զրո ( E n= 0): «Պոտենցիալ էներգիա» հասկացությունը վերաբերում է միայն պահպանողական համակարգերին, այսինքն. համակարգեր, որոնցում գործող ուժերի աշխատանքը կախված է միայն համակարգի սկզբնական և վերջնական դիրքերից։ Այսպիսով, բեռի կշռման համար Պ, բարձրացված բարձրության վրա հ, պոտենցիալ էներգիան հավասար կլինի En = Ph (E n= 0 ժամը հ= 0); զսպանակին ամրացված բեռի համար, E n = kΔl 2 / 2, Որտեղ Δl- աղբյուրի երկարացում (սեղմում), կ- դրա կոշտության գործակիցը ( E n= 0 ժամը լ= 0); զանգված ունեցող երկու մասնիկների համար մ 1Եվ մ 2գրավում է համընդհանուր ձգողության օրենքով,  , Որտեղ γ
- գրավիտացիոն հաստատուն, r- մասնիկների միջև հեռավորությունը ( E n= 0 ժամը r → ∞).
, Որտեղ γ
- գրավիտացիոն հաստատուն, r- մասնիկների միջև հեռավորությունը ( E n= 0 ժամը r → ∞).
Դիտարկենք Երկրային համակարգի պոտենցիալ էներգիան՝ զանգվածի մարմին մ, բարձրացված բարձրության վրա հԵրկրի մակերեւույթից վեր։ Նման համակարգի պոտենցիալ էներգիայի նվազումը չափվում է մարմնի վրա Երկիր ազատ անկման ժամանակ կատարվող գրավիտացիոն ուժերի աշխատանքով։ Եթե մարմինը ընկնում է ուղղահայաց, ապա
Որտեղ E ոչ- համակարգի պոտենցիալ էներգիան ժամը հ= 0 («-» նշանը ցույց է տալիս, որ աշխատանքը կատարվում է պոտենցիալ էներգիայի կորստի պատճառով):
Եթե նույն մարմինն ընկնում է երկարության թեք հարթությունից լև ուղղահայաց α-ի թեքությամբ ( lcosα = h), ապա գրավիտացիոն ուժերի կատարած աշխատանքը հավասար է նախորդ արժեքին.
Եթե, վերջապես, մարմինը շարժվում է կամայական կորագիծ հետագծով, ապա մենք կարող ենք պատկերացնել այս կորը, որը բաղկացած է. nփոքր ուղիղ հատվածներ Δl i. Այս հատվածներից յուրաքանչյուրի վրա ձգողական ուժի կատարած աշխատանքը հավասար է
Ամբողջ կորագիծ ուղու երկայնքով գրավիտացիոն ուժերի կատարած աշխատանքը ակնհայտորեն հավասար է.
Այսպիսով, գրավիտացիոն ուժերի աշխատանքը կախված է միայն ճանապարհի մեկնարկային և վերջնակետերի բարձրությունների տարբերությունից։
Այսպիսով, պոտենցիալ (պահպանողական) ուժերի դաշտում գտնվող մարմինը ունի պոտենցիալ էներգիա: Համակարգի կազմաձևման անսահման փոքր փոփոխության դեպքում պահպանողական ուժերի աշխատանքը հավասար է մինուս նշանով վերցված պոտենցիալ էներգիայի ավելացմանը, քանի որ աշխատանքը կատարվում է պոտենցիալ էներգիայի նվազման պատճառով.

Իր հերթին՝ աշխատիր dAարտահայտված որպես ուժի կետային արտադրյալ Ֆշարժվել դոկտ, ուստի վերջին արտահայտությունը կարելի է գրել հետևյալ կերպ.
 (3.9)
(3.9)
Հետևաբար, եթե ֆունկցիան հայտնի է E n (r), ապա (3.9) արտահայտությունից կարող ենք գտնել ուժը Ֆըստ մոդուլի և ուղղության:
Պահպանողական ուժերի համար
Կամ վեկտորի տեսքով

Որտեղ
 (3.10)
(3.10)
(3.10) արտահայտությամբ սահմանված վեկտորը կոչվում է Սկալյար ֆունկցիայի գրադիենտ P; ես, ժ, կ- կոորդինատային առանցքների միավոր վեկտորներ (orts):
Գործառույթի հատուկ տեսակ Պ(մեր դեպքում E n) կախված է ուժային դաշտի բնույթից (գրավիտացիոն, էլեկտրաստատիկ և այլն), ինչպես ցույց է տրվել վերևում։
Ընդհանուր մեխանիկական էներգիա Վհամակարգը հավասար է նրա կինետիկ և պոտենցիալ էներգիաների գումարին.

Համակարգի պոտենցիալ էներգիայի սահմանումից և դիտարկված օրինակներից պարզ է դառնում, որ այս էներգիան, ինչպես կինետիկ էներգիան, համակարգի վիճակի ֆունկցիան է. այն կախված է միայն համակարգի կազմաձևից և նրա դիրքից։ արտաքին մարմիններին. Հետևաբար, համակարգի ընդհանուր մեխանիկական էներգիան նույնպես համակարգի վիճակի ֆունկցիա է, այսինքն. կախված է միայն համակարգի բոլոր մարմինների դիրքից և արագություններից:
1) Կինետիկ էներգիա.
Եթե մարմինը զանգված ունի մշարժվում է v արագությամբ, այնուհետև այն ունի էներգիա,
Աշխատանքը հավասար է մարմնի կինետիկ էներգիայի փոփոխությանը. ![]() .
.
2) պոտենցիալ էներգիա.
Զանգվածի ցանկացած մարմին մ, գրավիտացիայի ազդեցության տակ ունի էներգիա.
որտեղ h-ը պայմանական զրոյական մակարդակից բարձր բարձրությունն է, g-ը ազատ անկման արագացումն է:
Էլաստիկ դեֆորմացված մարմինն ունի նաև պոտենցիալ էներգիա։ Եթե գարնանային կոշտությունը կչափով դեֆորմացված x, ապա այն ունի էներգիա.
 Պոտենցիալ էներգիան մարմինների (կամ դրա մասերի) փոխազդեցության էներգիան է։
Պոտենցիալ էներգիան մարմինների (կամ դրա մասերի) փոխազդեցության էներգիան է։
Նկատի ունեցեք, որ մարմինների ոչ բոլոր փոխազդեցություններն են բնութագրվում պոտենցիալ էներգիայով: Կան հատուկ ջոկատայիններ, որոնց աշխատանքը կախված չէ հետագծի ձևից, այլ որոշվում է միայն մարմինների սկզբնական և վերջնական դիրքերով (նկ.)։ Նման ուժերը կոչվում են պահպանողական. Օրինակ՝ պահպանողական ուժերը ներառում են ձգողականությունը և առաձգականությունը, իսկ ոչ պահպանողական ուժերը՝ շփումը։
Աշխատանքը հավասար է պոտենցիալ էներգիայի փոփոխությանը մինուս նշանով.
Էներգիայի չափման միավորը 1 Ջուլ է։
Էներգիայի պահպանման օրենքը.
Եկեք դիտարկենք պահպանողական մեխանիկական համակարգը, այսինքն. համակարգ, որտեղ գործում են միայն պահպանողական ուժերը։
Պահպանման օրենքը ձևակերպված է ընդհանուր էներգիայի համար:
Լի էներգիայովՄեխանիկական համակարգը այս համակարգում ընդգրկված մարմինների կինետիկ և պոտենցիալ էներգիաների գումարն է. ![]()
Այսպիսով, Փակ պահպանողական մեխանիկական համակարգում ընդհանուր էներգիան պահպանվում է.
Կամ, պահպանողական համակարգերում արտաքին ազդեցության բացակայության դեպքում ընդհանուր էներգիան մնում է հաստատուն.
Հաճախ պոտենցիալ էներգիան կոորդինատների ֆունկցիա է: Եկեք գծենք ընդհանուր էներգիայի և պոտենցիալ էներգիայի գրաֆիկները մեկ կոորդինատային հարթության վրա: Պոտենցիալ էներգիայի գրաֆիկը կարող է աճել կամ նվազել, բայց ընդհանուր էներգիայի գրաֆիկը հորիզոնական է, քանի որ ընդհանուր էներգիան հաստատուն է (պահպանողական համակարգերում)։

ABC-ն պոտենցիալ անցք է:
CDR-ը պոտենցիալ խոչընդոտ է:
Կենտրոնական գնդակի հարված.
Պահպանության օրենքներն օգտագործվում են բազմաթիվ ֆիզիկական խնդիրներ վերլուծելու և լուծելու համար, որոնցից մեկը մարմինների ազդեցությունն է:
Հարվածել- երկու կամ ավելի մարմինների բախում, որոնցում փոխազդեցությունը տևում է շատ կարճ:
Ազդեցության ժամանակ մարմինների միջև տեղի է ունենում էներգիայի և թափի վերաբաշխում։ Այս դեպքում համակարգի մեխանիկական էներգիայի մի մասը կարող է վերածվել ոչ մեխանիկական էներգիայի։
Դիտարկենք ազդեցության սահմանափակող տեսակները:
- Անառաձգական ազդեցությունը հարված է, որից հետո մարմինները շարժվում են որպես մեկ ամբողջություն, մինչդեռ մեխանիկական էներգիայի մի մասը ծախսվում է դեֆորմացիայի վրա և վերածվում ոչ մեխանիկական ձևերի (ջերմային): Անառաձգական ազդեցության ժամանակ, միայնիմպուլսի պահպանման օրենքը.
- Բացարձակ առաձգական ազդեցությունը այն ազդեցությունն է, որի ժամանակ մեխանիկական էներգիան չի փոխակերպվում էներգիայի այլ, ոչ մեխանիկական տեսակների: Հարվածից հետո մարմիններն ամբողջությամբ վերականգնում են իրենց ձևն ու չափերը։ Համակարգի ընդհանուր էներգիան պահպանվում է։ Բացարձակ առաձգական ազդեցությամբ բավարարվում են նաև իմպուլսի և էներգիայի պահպանման օրենքները։
Դիտարկենք երկու գնդակների կենտրոնական ազդեցությունը:
Հարվածը կոչվում է կենտրոնական, եթե մինչ հարվածը գնդակները շարժվում են իրենց զանգվածի կենտրոններով անցնող գծով։
Թող զանգվածները հայտնի լինեն մ 1, մ 2և գնդակների արագությունը մինչև հարվածը. v 1, v 2
Նշելով «գործողություն». Կարելի է եռանդուն մարդուն կանչել, ով շարժվում է, որոշակի աշխատանք է ստեղծում, կարող է ստեղծագործել, գործել։ Մարդկանց, կենդանի էակների և բնության ստեղծած մեքենաները նույնպես էներգիա ունեն։ Բայց սա սովորական կյանքում է: Բացի այդ, կա խիստ մեկը, որը սահմանել և նշանակել է էներգիայի բազմաթիվ տեսակներ՝ էլեկտրական, մագնիսական, ատոմային և այլն։ Այնուամենայնիվ, այժմ մենք կխոսենք պոտենցիալ էներգիայի մասին, որը չի կարելի դիտարկել կինետիկ էներգիայից մեկուսացված։
Կինետիկ էներգիա
Այս էներգիան, ըստ մեխանիկայի հասկացությունների, տիրապետում են միմյանց հետ փոխազդող բոլոր մարմիններին։ Իսկ այս դեպքում խոսքը մարմինների շարժման մասին է։
Պոտենցիալ էներգիա
Այս տեսակի էներգիան ստեղծվում է, երբ փոխազդեցություն կա մարմինների կամ մեկ մարմնի մասերի միջև, բայց շարժում, որպես այդպիսին, չկա։ Սա է հիմնական տարբերությունը կինետիկ էներգիայից: Օրինակ, եթե քարը բարձրացնեք գետնից բարձր և պահեք այն այս դիրքում, այն կունենա պոտենցիալ էներգիա, որը կարող է վերածվել կինետիկ էներգիայի, եթե քարն ազատվի:
Էներգիան սովորաբար կապված է աշխատանքի հետ։ Այսինքն, այս օրինակում ազատված քարը կարող է որոշակի աշխատանք առաջացնել, երբ ընկնում է: Իսկ աշխատանքի հնարավոր ծավալը հավասար կլինի մարմնի պոտենցիալ էներգիային որոշակի բարձրության վրա h. Այս էներգիան հաշվարկելու համար օգտագործվում է հետևյալ բանաձևը.
A=Fs=Ft*h=mgh կամ Ep=mgh, որտեղ.
Ep - մարմնի պոտենցիալ էներգիա,
մ - մարմնի քաշը,
h-ը մարմնի բարձրությունն է գետնից,
g-ն ազատ անկման արագացումն է:
Երկու տեսակի պոտենցիալ էներգիա
Պոտենցիալ էներգիան ունի երկու տեսակ.
1. Էներգիան մարմինների հարաբերական դիրքում. Կախովի քարն այդպիսի էներգիա ունի։ Հետաքրքիր է, որ սովորական փայտը կամ ածուխը նույնպես պոտենցիալ էներգիա ունի: Դրանք պարունակում են չօքսիդացված ածխածին, որը կարող է օքսիդանալ: Պարզ ասած, այրված փայտը կարող է պոտենցիալ տաքացնել ջուրը:
2. Էլաստիկ դեֆորմացիայի էներգիա. Օրինակներն այստեղ ներառում են առաձգական գոտի, սեղմված զսպանակ կամ «ոսկոր-մկանային կապան» համակարգը:
Պոտենցիալ և կինետիկ էներգիան փոխկապակցված են: Նրանք կարող են փոխակերպվել միմյանց: Օրինակ, եթե քարը վեր եք նետում, այն սկզբում կինետիկ էներգիա ունի շարժվելիս: Երբ այն հասնի որոշակի կետի, այն մի պահ կսառչի և ձեռք կբերի պոտենցիալ էներգիա, իսկ հետո ձգողականությունը ցած կքաշի այն և նորից կառաջանա կինետիկ էներգիա։