Навіщо потрібна механічна енергія. Що таке потенційна енергія? Форми та види енергії
1.2.3 Робота сил у механіці, енергія. Закон збереження енергії у механіці
Роботоюпостійної сили Fколи тіло рухається поступально і прямолінійно, при проходженні тілом шляху S називають величину
Робота, що чиниться силою Fна кінцевому шляху s, дорівнює сумі елементарних робіт на окремих нескінченно малих ділянках колії; ця сума наводиться до інтегралу:
Силу F,що діє на матеріальну точку, називають консервативної, або потенційною, якщо робота А, що здійснюється цією силою при переміщенні точки з одного довільного положення в інше, не залежить від того, якою траєкторією це переміщення відбулося. Тому при переміщенні матеріальної точки вздовж замкнутої траєкторії робота консервативної сили тотожно дорівнює нулю. Таким чином, консервативні сили можна визначити двома способами:
1) як силу, робота якої не залежить від шляху, яким частка переходить з одного положення в інше;
2) як силу, робота якої замкненим шляхом дорівнює нулю.
Прикладами консервативних сил можуть бути сили всесвітнього тяжіння, сили пружності, сили електростатичної взаємодії між зарядженими тілами.
Усі сили, що не задовольняють умову консервативності, називаються неконсервативними . Характерним прикладом таких сил є сили тертя ковзання. Сила тертя ковзання завжди спрямована у бік, протилежний напрямку руху, так що cosα = -1. Тому робота сили тертя ковзання вздовж замкнутої траєкторії завжди негативна і ніколи не дорівнює нулю.
Для характеристики швидкості виконання роботи силою вводиться поняття потужності. Потужністю Nсили Fназивається фізична величина, чисельно рівна роботі, що здійснюється цією силою за одиницю часу:
де v - Швидкість точки докладання сили.
У механіці розрізняють два види енергії, кінетичну та потенційну. Кінетичною енергієютіла називають енергію Е K , що є мірою його механічного руху і що вимірюється тією роботою, яку може здійснити тіло при його гальмуванні до повної зупинки. Знайдемо вираз для кінетичної енергії твердого тіла В,має масу ті рухається поступально зі швидкістю v.
Нехай тіло Угальмується під дією деякою силою F(у загальному випадку змінної) та на малій ділянці колії ds здійснює елементарну роботу d А= - F τ ds. За другим законом Ньютона - F τ = mdv/ dt Отже, dA = - m (dv/ dt) ds = - m (ds/ dt) dv = - m v dv. Робота, що здійснюється тілом Удо повної його зупинки
Ця формула справедлива для кінетичної енергії матеріальної точки. Будь-яку механічну систему можна як систему матеріальних точок. Тому кінетична енергія Е K механічної системи дорівнює сумі кінетичних енергій всіх пматеріальних точок, що утворюють цю систему:
|
Е до = ∑ Е i = ∑m i v i 2 /2 |
де m i , v i- маса та швидкість i-ї матеріальної точки. Таким чином, кінетична енергія системи повністю визначається величинами мас та швидкостей руху. входять до неї матеріальних точок. Вона залежить від цього, яким чином частини аналізованої системи набули дані значення швидкостей. Коротко цей важливий висновок можна сформулювати так: кінетична енергія системи є функцією стану її руху.
Якщо систему матеріальних точок чи тіл діють консервативні (потенційні) сили, можна ввести поняття потенційної енергії цієї системи. Справді, робота, що здійснюється консервативними силами, залежить від цього, як було здійснено це переміщення. Робота А 1-2 при переміщенні системи з однієї точки простору, повністю визначається початковою та кінцевою місцезнаходженнями системи . Це можна висловити у формі
|
А 1-2 = Еп 1 – Еп 2 |
де Еп - деяка функція стану системи, залежить лише від координат всіх матеріальних точок системи. Цю функцію називають потенційною енергієюсистеми. Звідси випливає, що робота консервативних сил, що діють на механічну систему, дорівнює убутку потенційної енергії цієї системи. З визначення випливає, що потенційна енергія системи у довільному стані дорівнює роботі, що здійснюється консервативними силами при переведенні системи з одного стану до іншого за умовою завдання.
Так, наприклад, робота сили тяжіння залежить тільки від різниці висот початкової та кінцевої точок шляху. Сила тяжкості тіла прикладена до центру тяжкості. Тому робота сили тяжіння за будь-якого руху тіла дорівнює добутку цієї сили на різницю висот початкового і кінцевого положень його центру тяжіння. Звідси випливає, що робота сили тяжіння вздовж замкнутої траєкторії центру тяжіння тіла дорівнює нулю, тобто, що сила тяжіння дійсно є консервативною. Потенційна енергія тіла піднятого на висоту Hнад поверхнею Землі дорівнює
Знайдемо потенційну енергію пружно деформованого тіла. Сила пружності F ynp, як відомо з досвіду, пропорційна величині деформації х, тобто. F ynp , = - kхде k - Коефіцієнт пружності, що характеризує пружні властивості тіла, а знак мінус показує, що сила пружності спрямована в бік, протилежний до напрямку деформації: пружно деформоване тіло прагне відновити свої початкові форму і розміри.
Елементарна робота, що здійснюється силою F ynpпри нескінченно малій зміні деформації тіла на величину dxдорівнює dА = (F ynp dx) = - kxdx. Робота цієї сили при кінцевій зміні деформації тіла, наприклад при перекладі його з недеформованого стану ( х=0) у стан, що відповідає деформації х, дорівнює
Повний механічною енергієюсистеми називають величину E, рівну сумі кінетичної та потенційної енергій цієї системи:
|
E = E K + E n . |
Повна механічна енергія системи - функція її стану, оскільки залежить лише від координат, швидкостей та мас усіх малих частин (матеріальних точок) системи
Знайдемо умову, якій має задовольняти система тіл у тому, щоб її повна механічна енергія не змінювалася з часом. Якщо v- швидкість i- й матеріальної точки з масою т і то її кінетична енергія E до i = m i v i 2 /2. Зміна цієї енергії за короткий проміжок часу dt, пов'язане зі зміною швидкості v, на dv i = a i dt (а i- прискорення аналізованої матеріальної точки),
|
dE до i = m i /2[(dv i , v i ) + (v i ,dv i ,)] = m i (a i dt,v i ,) = (m i а i , v t dt) =(m i а i , dr i ) |
де dr i = v i dt- збільшення радіуса-вектора r i , матеріальної точки. За другим законом Ньютона m i а i = F i + f i , де F iі f i - результуючі, відповідно, консервативних та неконсервативних сил, що діють на i- ю матеріальну точку. Тому
Перша сума у правій частині цього рівняння є сумарною роботою dA, що здійснюється всіма консервативними силами за проміжок часу dt. Ця робота дорівнює убутку за той же час dt потенційної енергії системи
де Е= Е K + Е n - Повна механічна енергія системи.
Якщо внутрішні сили взаємодії між якими консервативні, а всі зовнішні сили - стаціонарні та консервативні, таку систему тіл (матеріальних точок) називають консервативною системою,. Для такої системи dA = dE = 0 і
|
E = E K + E п= const, |
т. е. повна механічна енергія консервативної системи змінюється з часом. Цей закон називають законом збереження механічної енергії. Він справедливий, для замкнутої консервативної системи,т е системи, яку зовнішні сили не діють, проте внутрішні сили - консервативні.
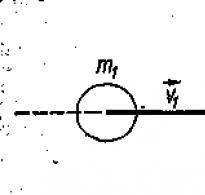
Розглянемо застосування закону збереження механічної енергії для розрахунку абсолютно пружного прямого центрального удару двох тіл. Абсолютно пружнимназивають такий удар, у результаті якого відбувається перетворення механічної енергії системи соударяющихся тіл на інші види енергії. Нехай дві абсолютно пружні кулі з масами m 1 і m 2 до удару (малюнок - 1.32, а)рухаються поступово зі швидкостями v 1 і v 2 , спрямованими в один і той же бік вздовж лінії їх центрів, причому v 1 > v 2 . Потрібно знайти швидкості куль u 1 і u 2 після зіткнення (малюнок - 1.32, б).
|
|
|
|
Малюнок – 1.32 |
|


У процесі удару систему тіл, що сударяються, можна вважати замкненою. Отже, для вирішення цього завдання можна скористатися законами збереження механічної енергії та імпульсу. Перед ударом і після його завершення тіла, що суударяются, не деформовані, тобто потенційну енергію системи в цих двох станах можна вважати однаковою і рівною нулю. Тоді із закону збереження механічної енергії маємо
Спільне рішення двох останніх рівнянь дає
|
u 1 = / (m 1 +m 2 ), u 2 = / (m 1 +m 2 ) |
тобто, після пружного зіткнення тіла рухаються кожна зі своєю швидкістю кінетичною енергією Е 1 і Е 2 відповідно.
Систему тіл називають дисипативною, якщо її механічна енергія поступово зменшується за рахунок перетворення на інші (немеханічні) форми енергії. Цей процес називають процесом дисипації(розсіювання) енергії. Як приклад розглянемо дисипацію енергії за абсолютно непругомпрямому центральному ударі двох тіл, що поступально рухаються.
При абсолютно непружному ударі відбувається дисипація енергії.Зміна ∆ E повної механічної енергії системи тіл, що сударяються, дорівнює зміні їх кінетичної енергії
Після перетворень, розсіяна енергія дорівнює:
|
∆E =- m 1 m 2 (v 1 – v 2 ) 2 /2(m 1 + m 2 ) |
Якщо тіло може здійснити механічну роботу, то воно має механічною енергією Е(Дж). Або якщо зовнішня сила виконує роботу, впливаючи на тіло, його енергія змінюється.
Існує два види механічної енергії: кінетична та потенційна.
Кінетична енергія -енергія рухомих тіл:
де v(м/с) – модуль швидкості, m – маса тіла.
Потенціальна енергія- Енергія взаємодіючих тіл.
Приклади потенційної енергії у механіці.
Тіло підняте над землею: Е = mgh
де h – висота, що визначається від нульового рівня (або нижньої точки траєкторії). Форма траєкторії не важлива, має значення лише початкова та кінцева висота.
Пружно деформоване тіло.Деформація, яка визначається положення недеформованого тіла (пружини, шнура і т.п.).
Потенційна енергія пружних тіл: де k - жорсткість пружини; х – її деформація.
Енергія може передаватися від одних тіл до інших, а також перетворюватися з одного виду на інший.
![]() - Повна механічна енергія.
- Повна механічна енергія.
Закон збереження енергії: в замкненоюсистемі тіл повна енергія не змінюєтьсяза будь-яких взаємодій усередині цієї системи тел.
|
Сума кінетичної та потенційної енергії тіл, що становлять замкнуту систему та взаємодіють між собою за допомогою сил тяжіння та сил пружності, залишається незмінною.
2.
Трансформатори. Принцип дії. Пристрій. Коефіцієнт трансформації. Передача електроенергії.
Перетворення змінного струму, при якому напруга збільшується або зменшується у кілька разів практично без  втрати потужності, що здійснюється за допомогою трансформаторів.
втрати потужності, що здійснюється за допомогою трансформаторів.
Трансформатор- пристрій, застосовуваний підвищення чи зниження напруги змінного струму.
Вперше трансформатори були використані у 1878р. російським вченим П. Н. Яблочковим для харчування винайдених ним «електричних свічок» - нового на той час джерела світла.
Найпростіший трансформатор є дві котушки. Намотані на загальний сталевий сердечник. Одна котушка підключається до джерела змінногонапруги. Ця котушка називається первинноїобмоткою), а з іншої котушки (називається вторинноїобмоткою) знімають змінну напругу для подальшої передачі.
Змінний струм у первинній обмотці створює змінне магнітне поле. Завдяки сталевому сердечнику вторинну обмотку, намотану на той же сердечник, пронизує практично таке ж зміннеполе, як і первинну.
Оскільки всі виткипронизуються одним і тим же змінним магнітним потоком, внаслідок явища електромагнітної індукції в кожному виткугенерується одна і та ж напруга. Тому відношення напруг 1 і 2 первинної і вторинної обмотках дорівнює відношенню числа витків в них:
Зміна напруги трансформатором характеризує коефіцієнт трансформації
Коефіцієнт трансформації - величина, що дорівнює відношенню напруг у первинній та вторинній обмотках трансформатора:
Підвищуючийтрансформатор- трансформатор, що збільшує напругу ( У трансформатора, що підвищує, число витків у вторинній обмотці має бути більше числа витків у первинній обмотці, тобто до<1.
Знижувальнийтрансформатор - трансформатор, що зменшує напругу (У понижуючого трансформатора число витків у вторинній обмотці має бути менше числа витків у первинній обмотці, тобто>1.
Передача електричної енергії від електростанцій до великих міст чи промислових центрів на відстані тисячі кілометрів є складною науково-технічною проблемою. Для зменшення втрат на нагрівання проводів необхідно зменшити силу струму лінії передачі, і, отже, збільшити напругу. Зазвичай лінії електропередачі будуються для напруги 400–500 кВ, причому у лініях використовується трифазний струм частотою 50 Гц.
Білет № 12
Закон Паскаля. Закон Архімеда. Умови плавання: тел.
Формулювання закону Паскаля
Тиск, що виробляється на рідину або газ, передається в будь-яку точку. однаково у всіх напрямках.Це твердження пояснюється рухливістю частинок рідин та газів у всіх напрямках.
На основі закону Паскаля гідростатики працюють різні гідравлічні пристрої: гальмівні системи, преси та ін.
Закон Архімеда- це закон статики рідин і газів, згідно з яким на тіло, занурене в рідину (або газ), діє сила, що виштовхує (сила Архімеда), що дорівнює ваги витісненої цим тілом рідини (або газу).

F A = ρgV,
де ρ
- щільність рідини (газу),
g - прискорення вільного падіння,
V - об'єм зануреного тіла (або об'єм тієї частини тіла, яку занурили в рідину (або газ)).
Архімедова сила спрямована завжди протилежно силі тяжіння. Вона дорівнює нулю, якщо занурене в рідину тіло щільно, усією основою притиснуто до дна.
Слід пам'ятати, що у стані невагомості закон Архімеда не працює.
У механіці розрізняють два види енергії: кінетичну та потенційну. Кінетичною енергієюназивають механічну енергію всякого тіла, що вільно рухається, і вимірюють її тією роботою, яку могло б зробити тіло при його гальмуванні до повної зупинки.
Нехай тіло У, що рухається зі швидкістю vпочинає взаємодіяти з іншим тілом Зі при цьому гальмується. Отже, тіло Удіє на тіло Зз деякою силою Fта на елементарній ділянці колії dsздійснює роботу
За третім законом Ньютона на тіло В одночасно діє сила -F, дотична складова якої -F τвикликає зміну чисельного значення швидкості тіла. Згідно з другим законом Ньютона

Отже,
Робота, що здійснюється тілом до повної його зупинки дорівнює:

Отже, кінетична енергія тіла, що поступально рухається, дорівнює половині добутку маси цього тіла на квадрат його швидкості:
 (3.7)
(3.7)
З формули (3.7) видно, що кінетична енергія тіла може бути негативною ( E k ≥ 0).
Якщо система складається з nтіл, що поступально рухаються, то для її зупинки необхідно загальмувати кожне з цих тіл. Тому повна кінетична енергія механічної системи дорівнює сумі кінетичних енергій всіх тіл, що входять до неї:
 (3.8)
(3.8)
З формули (3.8) видно, що E kзалежить тільки від величини мас і швидкостей руху, що входять до неї тіл. При цьому не має значення, яким чином тіло масою m iнабуло швидкості ν i. Іншими словами, кінетична енергія системи є функцією стану її руху.
Швидкості ν iЗначно залежить від вибору системи отсчета. При виведенні формул (3.7) та (3.8) передбачалося, що рух розглядається в інерційній системі відліку, т.к. інакше не можна було б використовувати закони Ньютона. Однак, у різних інерційних системах відліку, що рухаються щодо один одного, швидкість ν i i-го тіла системи, а, отже, його E kiі кінетична енергія всієї системи будуть неоднакові. Отже, кінетична енергія системи залежить від вибору системи відліку, тобто. є величиною відносною.
Потенціальна енергія– це механічна енергія системи тіл, яка визначається їх взаємним розташуванням та характером сил взаємодії між ними.
Чисельно потенційна енергія системи в даному її положенні дорівнює роботі, яку зроблять сили, що діють на систему, при переміщенні системи з цього положення в те, де потенційна енергія умовно приймається рівною нулю ( E n= 0). Поняття «потенційна енергія» має місце лише консервативних систем, тобто. систем, у яких робота сил залежить тільки від початкового і кінцевого становища системи. Так, для вантажу вагою Pпіднято на висоту h, потенційна енергія дорівнюватиме E n = Ph (E n= 0 при h= 0); для вантажу, прикріпленого до пружини, E n = kΔl 2/2, де Δl- подовження (стиснення) пружини, k- Її коефіцієнт жорсткості ( E n= 0 при l= 0); для двох частинок з масами m 1і m 2, що притягуються за законом всесвітнього тяжіння,  , де γ
- гравітаційна постійна, r- Відстань між частинками ( E n= 0 при r → ∞).
, де γ
- гравітаційна постійна, r- Відстань між частинками ( E n= 0 при r → ∞).
Розглянемо потенційну енергію системи Земля – тіло масою mпіднято на висоту hнад поверхнею Землі. Зменшення потенційної енергії такої системи вимірюється роботою сил тяжіння, що здійснюється при вільному падінні тіла на Землю. Якщо тіло падає по вертикалі, то
Де E no– потенційна енергія системи при h= 0 (знак «-» показує, що робота здійснюється за рахунок зменшення потенційної енергії).
Якщо це тіло падає по похилій площині завдовжки lі з кутом нахилу α до вертикалі ( lcosα = h), то робота сил тяжіння дорівнює колишній величині:
Якщо, нарешті, тіло рухається по довільній криволінійній траєкторії, то можна уявити собі цю криву, що складається з nмалих прямолінійних ділянок Δl i. Робота сили тяжіння на кожній з таких ділянок дорівнює
На всьому криволінійному шляху робота сил тяжіння, очевидно, дорівнює:
Отже, робота сил тяжіння залежить тільки від різниці висот початкової та кінцевої точок шляху.
Таким чином, тіло в потенційному (консервативному) полі сил має потенційну енергію. При нескінченно малій зміні конфігурації системи робота консервативних сил дорівнює приросту потенційної енергії, взятому зі знаком мінус, тому що робота здійснюється за рахунок зменшення потенційної енергії:

У свою чергу робота dAвиражається як скалярний добуток сили Fна переміщення drтому останній вираз можна записати наступним чином:
 (3.9)
(3.9)
Отже, якщо відома функція E n (r), то з виразу (3.9) можна знайти силу Fза модулем та напрямком.
Для консервативних сил
Або у векторному вигляді

де
 (3.10)
(3.10)
Вектор, який визначається виразом (3.10), називається градієнтом скалярної функції П; i, j, k- Поодинокі вектори координатних осей (орти).
Конкретний вид функції П(у нашому випадку E n) залежить від характеру силового поля (гравітаційне, електростатичне тощо), що було показано вище.
Повна механічна енергія Wсистеми дорівнює сумі її кінетичної та потенційної енергій:

З визначення потенційної енергії системи та розглянутих прикладів видно, що ця енергія, подібно до кінетичної енергії, є функцією стану системи: вона залежить тільки від конфігурації системи та її положення по відношенню до зовнішніх тіл. Отже, повна механічна енергія системи є функцією стану системи, тобто. залежить тільки від положення та швидкостей всіх тіл системи.
1) Кінетична енергія.
Якщо тіло масою mрухається зі швидкістю v, то воно має енергію ,
Робота дорівнює зміні кінетичної енергії тіла: ![]() .
.
2) Потенційна енергія.
Будь-яке тіло маси m, що знаходиться під дією гравітації має енергію: ,
де h – висота над умовним нульовим рівнем, g – прискорення вільного падіння.
Потенційною енергією також володіє пружно деформоване тіло. Якщо пружина жорсткістю kдеформована на величину x, то вона має енергію: ,
 Потенційна енергія – це енергія взаємодії тіл (або його частин).
Потенційна енергія – це енергія взаємодії тіл (або його частин).
Зазначимо, що не всяка взаємодія тіл характеризується потенційною енергією. Є особливі сили, робота яких залежить від форми траєкторії, а визначається лише початковим і кінцевим положенням тіл (рис.). Такі сили називають консервативними. Наприклад, до консервативних сил відносяться сила тяжіння, сила пружності, до неконсервативних – сила тертя.
Робота дорівнює зміні потенційної енергії зі знаком мінус:
Одиниця виміру енергії – 1 Джоуль.
Закон збереження енергії.
Розглянемо консервативну механічну систему, тобто. таку систему у якій діють лише консервативні сили.
Закон збереження формулюється на повну енергію.
Повною енергієюмеханічної системи називають суму кінетичних та потенційних енергій тіл, що входять до цієї системи: ![]()
Отже, у замкнутій консервативній механічній системі повна енергія зберігається.
Або, у консервативних системах за відсутності зовнішнього впливу повна енергія залишається постійною.
Часто потенційна енергія є функцією координат. Зобразимо на одній координатній площині графіки повної енергії та потенційної енергії. Графік потенційної енергії може зростати чи зменшуватися, а графік повної енергії горизонтальний, т.к. повна енергія стала (у консервативних системах).

ABC – потенційна яма.
CDR – потенційний бар'єр.
Центральний удар куль.
Закони збереження застосовуються для аналізу та вирішення безлічі фізичних завдань, одним із яких є удар тіл.
Удар- Зіткнення двох або більше тіл, при якому взаємодія триває дуже короткий час.
При ударі між тілами відбувається перерозподіл енергій та імпульсу. При цьому частина механічної енергії системи може перейти у немеханічні.
Розглянемо граничні види удару.
- Непружний удар - удар, після якого тіла рухаються як єдине ціле, при цьому частина механічної енергії витрачається на деформацію і переходить у немеханічні види (теплову). При непружному ударі виконується тількизакон збереження імпульсу.
- Абсолютно пружний удар – удар, у якому механічна енергія не перетворюється на інші, немеханічні, види енергії. Після удару тіла повністю відновлюють форми та розміри. Повна енергія системи зберігається. При абсолютно пружному ударі виконуються і закони збереження імпульсу та енергії.
Розглянемо центральний удар двох куль.
Удар називається центральнимякщо до удару кулі рухаються вздовж лінії, що проходить через їх центри мас.
Нехай відомі маси m 1 , m 2та швидкості куль до удару: v 1 , v 2
Що означає «дія». Можна назвати енергійною людину, яка рухається, створює певну роботу, може творити, діяти. Також енергією володіють машини, створені людьми, жива та природа. Але це у звичайному житті. Крім цього, є строга, яка визначила і позначила багато видів енергії – електричну, магнітну, атомну та ін. Однак зараз йтиметься про потенційну енергію, яку не можна розглядати у відриві від кінетичної.
Кінетична енергія
Цю енергію, згідно з уявленнями механіки, мають всі тіла, які взаємодіють один з одним. І в цьому випадку йдеться про рух тіл.
Потенціальна енергія
У цей вид енергії створюється, коли відбувається взаємодія тіл або частин одного тіла, але при цьому немає руху як такого. У цьому вся головна відмінність від кінетичної енергії. Наприклад, якщо підняти камінь над землею і утримати в цьому положенні, він матиме потенційну енергію, яка може перейти в кінетичну, якщо відпустити камінь.
Зазвичай енергію пов'язують із роботою. Тобто у цьому прикладі відпущений камінь може зробити деяку роботу під час падіння. А можлива величина роботи дорівнюватиме потенційної енергії тіла при певній висоті h. Для обчислення цієї енергії застосовується така формула:
A=Fs=Fт*h=mgh, або Eп=mgh, де:
Eп - потенційна енергія тіла,
m - маса тіла,
h - висота тіла над поверхнею землі
g – прискорення вільного падіння.
Два види потенційної енергії
У потенційної енергії відрізняється два види:
1. Енергія при взаємному розташуванні тел. Таку енергію має підвішений камінь. Цікаво, але потенційну енергію мають і звичайні дрова або вугілля. Вони міститься не окислений вуглець, який може окислитися. Якщо сказати простіше, дрова, що згоріли, потенційно можуть нагріти воду.
2. Енергія пружної деформації. Для прикладу тут можна навести еластичний джгут, стиснуту пружину або система «кістки-м'язи-зв'язки».
Потенційна та кінетична енергія взаємопов'язані. Вони можуть переходити один в одного. Наприклад, якщо підкинути камінь вгору, при русі спочатку він має кінетичну енергію. Коли він досягне певної точки, то на мить замре і отримає потенційну енергію, а потім гравітація потягне його вниз і знову кінетична енергія.