Dlaczego potrzebna jest energia mechaniczna? Co to jest energia potencjalna. Formy i rodzaje energii
1.2.3 Praca sił w mechanice, energia. Prawo zachowania energii w mechanice
Praca stała siła F, gdy ciało porusza się translacyjnie i prostoliniowo, gdy ciało przechodzi przez ścieżkę S, wielkość nazywa się
Praca wykonana siłą F na ostatecznej ścieżce S, równa sumie pracy elementarnej na poszczególnych nieskończenie małych odcinkach ścieżki; sumę tę sprowadza się do całki:
Wytrzymałość F, nazywa się działanie na punkt materialny konserwatywny, Lub potencjał, jeśli pracuje A, wykonywane przez tę siłę podczas przemieszczania punktu z jednego dowolnego położenia do drugiego, nie zależy od trajektorii, po której nastąpił ten ruch. Dlatego też, gdy punkt materialny porusza się po zamkniętej trajektorii, praca wykonana przez siłę zachowawczą jest identyczna równa zeru. Zatem siły konserwatywne można zdefiniować na dwa sposoby:
1) jako siła, której działanie nie zależy od ścieżki, po której cząstka przemieszcza się z jednego położenia do drugiego;
2) jako siła, której praca po zamkniętej drodze wynosi zero.
Przykładami sił zachowawczych są siły powszechnego ciążenia, siła sprężystości i siła oddziaływania elektrostatycznego pomiędzy naładowanymi ciałami.
Wszystkie siły, które nie spełniają warunku konserwatyzmu, nazywane są niekonserwatywnymi . Typowym przykładem takich sił są siły tarcia ślizgowego. Siła tarcia ślizgowego jest zawsze skierowana w kierunku przeciwnym do kierunku ruchu, więc cosα = -1. Dlatego praca siły tarcia ślizgowego po zamkniętej trajektorii jest zawsze ujemna i nigdy równa zeru.
Aby scharakteryzować prędkość pracy wykonywanej przez siłę, wprowadzono pojęcie mocy. Moc N wytrzymałość F jest wielkością fizyczną, która jest liczbowo równa pracy wykonanej przez tę siłę w jednostce czasu:
Gdzie w - prędkość punktu przyłożenia siły.
W mechanice istnieją dwa rodzaje energii: kinetyczna i potencjalna. Energia kinetyczna ciała nazywają energią mi K , która jest miarą jego ruchu mechanicznego i mierzona pracą, jaką ciało może wykonać, gdy zwalnia aż do całkowitego zatrzymania. Znajdźmy wyrażenie na energię kinetyczną ciała stałego W, posiadający masę T i poruszając się do przodu z prędkością v.
Niech ciało W zwalnia pod wpływem jakiejś siły F(w ogólnym przypadku zmienna) i na krótkim odcinku ścieżki ds wykonuje prace podstawowe, d A= - F τ ds. Zgodnie z drugim prawem Newtona - F τ = mdv/ dt Dlatego dA = - M (dw/ dt) ds = - M (ds/ dt) dw = - M w dw. Praca wykonywana przez ciało W aż do całkowitego zatrzymania
Wzór ten dotyczy energii kinetycznej punktu materialnego. Każdy układ mechaniczny można uznać za układ punktów materialnych. Dlatego energia kinetyczna mi K układ mechaniczny jest równy sumie energii kinetycznych wszystkich P punkty materialne tworzące ten układ:
|
mi Do = ∑ mi I = ∑M I w I 2 /2 |
Gdzie M I , w I- masa i prędkość I materialny punkt. Zatem energia kinetyczna układu jest całkowicie zdeterminowana przez wartości mas i prędkości ruchu. zawarte w nim punkty materialne. Nie zależy to od tego, w jaki sposób rozważane części układu uzyskały te wartości prędkości. W skrócie ten ważny wniosek można sformułować następująco: energia kinetyczna układu jest funkcją stanu jego ruchu.
Jeżeli na układ punktów lub ciał materialnych działają siły konserwatywne (potencjalne), wówczas można wprowadzić pojęcie energii potencjalnej tego układu. W rzeczywistości praca wykonana przez siły konserwatywne nie zależy od sposobu przeprowadzenia tego ruchu. Stanowisko A 1-2 podczas przenoszenia układu z jednego punktu w przestrzeni jest on całkowicie zdeterminowany przez początkowy i końcowy lokalizacje systemu . Można to wyrazić w formie
|
A 1-2 = Odc 1 – Odc 2 |
Gdzie Odc - pewna funkcja stanu układu, zależna jedynie od współrzędnych wszystkich punktów materialnych układu. Ta funkcja nazywa się energia potencjalna systemy. Wynika z tego, że praca wykonana przez siły zachowawcze działające na układ mechaniczny jest równa spadkowi energii potencjalnej tego układu. Z definicji wynika, że energia potencjalna układu w dowolnym stanie jest równa pracy wykonanej przez siły zachowawcze podczas przenoszenia układu z jednego stanu do drugiego zgodnie z warunkami zadania.
Na przykład praca grawitacji zależy tylko od różnicy wysokości punktów początkowego i końcowego ścieżki. Siła ciężkości ciała działa na jego środek ciężkości. Zatem praca wykonana przez grawitację podczas dowolnego ruchu ciała jest równa iloczynowi tej siły i różnicy wysokości początkowego i końcowego położenia jego środka ciężkości. Wynika z tego, że praca grawitacji po zamkniętej trajektorii środka ciężkości ciała jest równa zeru, czyli siła ciężkości jest rzeczywiście zachowawcza. Energia potencjalna ciała podniesionego na wysokość H nad powierzchnią Ziemi jest równa
Znajdźmy energię potencjalną ciała odkształconego sprężyście. Siła sprężystości F ynp jak wiadomo z doświadczenia, jest proporcjonalna do wielkości odkształcenia X, tj. F ynp , = - kX Gdzie k - współczynnik sprężystości charakteryzujący właściwości sprężyste ciała, a znak minus wskazuje, że siła sprężystości skierowana jest w kierunku przeciwnym do kierunku odkształcenia: ciało odkształcone sprężyście ma tendencję do przywracania pierwotnego kształtu i rozmiaru.
Praca elementarna wykonana siłą F ynp z nieskończenie małą zmianą odkształcenia ciała o wielkość dx równy DA = (F ynp dx) = - kxdx. Praca tej siły podczas skończonej zmiany odkształcenia ciała, na przykład podczas przenoszenia go ze stanu nieodkształconego ( X=0) do stanu odpowiadającego odkształceniu X, jest równy
Pełny energia mechaniczna systemy nazywają ilość mi, równa sumie energii kinetycznej i potencjalnej tego układu:
|
mi = mi K + mi N . |
Całkowita energia mechaniczna układu jest funkcją jego stanu, ponieważ zależy tylko od współrzędnych, prędkości i mas wszystkich małych części (punktów materialnych) układu
Znajdźmy warunek, jaki musi spełniać układ ciał, aby jego całkowita energia mechaniczna nie zmieniała się w czasie. Jeśli w- prędkość I- punkt materialny z masą T I następnie jego energia kinetyczna mi Do I = M I w I 2 /2. Zmiana tej energii w krótkim czasie dt, związane ze zmianą prędkości w, NA dw I = A I dt (A I- przyspieszenie rozpatrywanego punktu materialnego), jest równe
|
dE Do I = M I /2[(dw I , w I ) + (w I , dw I ,)] = M I (A I dt,w I ,) = (m I A I , w T dt) =(M I A I , dr I ) |
Gdzie dr I = w I dt- przyrost wektora promienia R I , punkt materialny. Zgodnie z drugim prawem Newtona M I A I = F I + F I , Gdzie F I I F I - wynikające odpowiednio z działania sił konserwatywnych i niezachowawczych I- masz materialny punkt. Dlatego
Pierwsza suma po prawej stronie tego równania reprezentuje pracę całkowitą dA, osiągnięte przez wszystkie siły konserwatywne w pewnym okresie czasu dt. Praca ta jest równa stracie za ten sam czas dt energia potencjalna układu
Gdzie E= mi K + mi N - całkowita energia mechaniczna układu.
Jeżeli wewnętrzne siły oddziaływania między którymi są konserwatywne, a wszystkie siły zewnętrzne są stacjonarne i konserwatywne, taki układ ciał (punktów materialnych) nazywa się system konserwatywny,. Dla takiego systemu dA = Dmi = 0 I
|
mi = mi K + mi P= stała, |
oznacza to, że całkowita energia mechaniczna układu konserwatywnego nie zmienia się w czasie. To prawo nazywa się prawo zachowania energii mechanicznej. Jest sprawiedliwy zamknięty system konserwatywny, to znaczy system, na który nie działają siły zewnętrzne, a wszystkie siły wewnętrzne są konserwatywne.
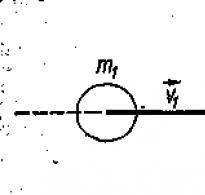
Rozważmy zastosowanie zasady zachowania energii mechanicznej do obliczenia absolutnie sprężystego bezpośredniego, centralnego uderzenia dwóch ciał. Absolutnie elastyczny zwane takim uderzeniem, w wyniku którego nie następuje konwersja energii mechanicznej układu zderzających się ciał na inny rodzaj energii. Niech dwie absolutnie elastyczne kulki z masami M 1 I M 2 przed uderzeniem (rysunek - 1.32, A) poruszanie się do przodu z dużą prędkością w 1 I w 2 , skierowane w tym samym kierunku wzdłuż linii ich środków, i w 1 > w 2 . Musimy znaleźć prędkość piłek ty 1 I ty 2 po uderzeniu (rysunek – 1,32, B).
|
|
|
|
Rysunek - 1.32 |
|


W procesie uderzenia układ zderzających się ciał można uznać za zamknięty. Dlatego, aby rozwiązać ten problem, możemy skorzystać z praw zachowania energii mechanicznej i pędu. Przed uderzeniem i po jego zakończeniu zderzające się ciała nie ulegają odkształceniu, tzn. energię potencjalną układu w tych dwóch stanach można uznać za jednakową i równą zeru. Następnie z prawa zachowania energii mechanicznej mamy
Daje wspólne rozwiązanie dwóch ostatnich równań
|
ty 1 = / (m 1 +m 2 ), ty 2 = / (m 1 +m 2 ) |
tj. po zderzeniu sprężystym każde z ciał porusza się z własną prędkością i energią kinetyczną mi 1 I mi 2 odpowiednio.
Układ ciał nazywa się rozpraszającym, jeśli jego energia mechaniczna stopniowo maleje w wyniku konwersji na inne (niemechaniczne) formy energii. Proces ten nazywa się procesem rozpusta(rozpraszanie) energia. Jako przykład rozważmy rozpraszanie energii w wartości absolutnej nieelastyczny bezpośrednie, centralne uderzenie dwóch stopniowo poruszających się ciał.
W zderzeniu całkowicie niesprężystym rozpusta energia. Zmiana ∆ mi całkowita energia mechaniczna układu zderzających się ciał jest równa zmianie ich energii kinetycznej
Po przekształceniach energia rozproszona wynosi:
|
∆mi =- M 1 M 2 (w 1 – w 2 ) 2 /2(M 1 + M 2 ) |
Jeśli ciało może wykonać pracę mechaniczną, to tak energia mechaniczna E(J). Lub, jeśli siła zewnętrzna działa, działając na ciało, zmienia się jej energia.
Istnieją dwa rodzaje energii mechanicznej: kinetyczna i potencjalna.
Energia kinetyczna - energia poruszających się ciał:
Gdzie w(m/s) – moduł prędkości, m – masa ciała.
Energia potencjalna– energia oddziałujących ciał.
Przykłady energii potencjalnej w mechanice.
Ciało unosi się nad ziemię: E = mgh
gdzie h jest wysokością wyznaczoną od poziomu zerowego (lub od najniższego punktu trajektorii). Kształt trajektorii nie jest ważny, liczy się tylko wysokość początkowa i końcowa.
Ciało odkształcone elastycznie. Odkształcenie określane na podstawie położenia ciała nieodkształconego (sprężyna, sznurek itp.).
Energia potencjalna ciał sprężystych: , gdzie k jest sztywnością sprężyny; x jest jego odkształceniem.
Energia może być przenoszona z jednego ciała na drugie, a także przekształcana z jednego rodzaju na drugi.
![]() - Całkowita energia mechaniczna.
- Całkowita energia mechaniczna.
Prawo zachowania energii: V Zamknięte system całego ciała energia się nie zmienia podczas wszelkich interakcji w obrębie tego układu ciał.
|
Suma energii kinetycznej i potencjalnej ciał tworzących układ zamknięty i oddziałujących ze sobą poprzez siły grawitacyjne i sprężyste pozostaje niezmieniona.
2.
Transformator. Zasada działania. Urządzenie. Współczynnik transformacji. Przesył energii elektrycznej.
Konwersja prądu przemiennego, podczas której napięcie wzrasta lub maleje kilka razy, praktycznie bez  utrata mocy odbywa się za pomocą transformatorów.
utrata mocy odbywa się za pomocą transformatorów.
Transformator- urządzenie służące do zwiększania lub zmniejszania napięcia prądu przemiennego.
Transformatory zastosowano po raz pierwszy w 1878 r. Rosyjski naukowiec P.N. Jabłoczkow zasilił wynalezione przez siebie „świece elektryczne”, które były wówczas nowym źródłem światła.
Najprostszy transformator składa się z dwóch cewek. Nawinięty na zwykły stalowy rdzeń. Jedna cewka jest podłączona do źródła zmienny Napięcie. Ta cewka nazywa się podstawowy uzwojenia) i z drugiej cewki (tzw wtórny uzwojenie) usunąć napięcie przemienne w celu jego dalszej transmisji.
Prąd przemienny w uzwojeniu pierwotnym wytwarza zmienne pole magnetyczne. Dzięki stalowemu rdzeniowi przez uzwojenie wtórne nawinięte na ten sam rdzeń przechodzi prawie tak samo zmienny pole jako podstawowe.
Ponieważ wszystko obraca się są penetrowane ten sam zmienny strumień magnetyczny, ze względu na zjawisko indukcji elektromagnetycznej co turę wygenerowane to samo napięcie. Dlatego stosunek napięć 𝑈 1 i 𝑈 2 uzwojenia pierwotnego i wtórnego jest równy stosunkowi liczby zwojów w nich:
Zmiana napięcia przez transformator charakteryzuje przekładnię transformacji
Współczynnik transformacji - wartość równa stosunkowi napięć w uzwojeniu pierwotnym i wtórnym transformatora:
Wzmocnienie transformator - transformator podwyższający napięcie (w transformatorze podwyższającym liczba zwojów w uzwojeniu wtórnym musi być większa od liczby zwojów w uzwojeniu pierwotnym, tj.<1.
Nachylenie transformator - transformator redukujący napięcie (w transformatorze obniżającym napięcie liczba zwojów w uzwojeniu wtórnym musi być mniejsza niż liczba zwojów w uzwojeniu pierwotnym, czyli k>1.
Przesyłanie energii elektrycznej z elektrowni do dużych miast lub ośrodków przemysłowych na odległości tysięcy kilometrów jest złożonym problemem naukowo-technicznym. Aby zmniejszyć straty spowodowane nagrzewaniem przewodów, należy zmniejszyć prąd w linii przesyłowej, a co za tym idzie, zwiększyć napięcie. Typowo elektroenergetyczne linie przesyłowe budowane są dla napięć 400–500 kV i wykorzystują w nich prąd trójfazowy o częstotliwości 50 Hz.
Bilet numer 12
Prawo Pascala. Prawo Archimedesa. Warunki żeglugi tel.
Sformułowanie prawa Pascala
Ciśnienie wytwarzane na cieczy lub gazie jest przenoszone do dowolnego punktu to samo we wszystkich kierunkach. Stwierdzenie to tłumaczy się ruchliwością cząstek cieczy i gazów we wszystkich kierunkach.
W oparciu o prawo hydrostatyki Pascala działają różne urządzenia hydrauliczne: układy hamulcowe, prasy itp.
Prawo Archimedesa to prawo statyki cieczy i gazów, zgodnie z którym na ciało zanurzone w cieczy (lub gazie) działa siła wyporu (siła Archimedesa) równa masie cieczy (lub gazu) wypartej przez to ciało .

F A = ρgV,
Gdzie ρ
- gęstość cieczy (gazu),
G - przyśpieszenie grawitacyjne,
V - objętość zanurzonego ciała (lub objętość tej części ciała, która jest zanurzona w cieczy (lub gazie)).
Siła Archimedesa jest skierowana zawsze przeciwnie do grawitacji. Jest równa zeru, jeśli ciało zanurzone w cieczy jest gęste, a cała jego podstawa jest dociśnięta do dna.
Należy o tym pamiętać W stanie nieważkości prawo Archimedesa nie działa.
W mechanice istnieją dwa rodzaje energii: kinetyczna i potencjalna. Energia kinetyczna nazywamy energię mechaniczną dowolnego swobodnie poruszającego się ciała i mierzmy ją pracą, jaką ciało może wykonać, gdy zwalnia aż do całkowitego zatrzymania.
Niech ciało W, poruszając się z dużą prędkością w, zaczyna oddziaływać z innym ciałem Z a jednocześnie spowalnia. Dlatego ciało W wpływa na organizm Z z pewną siłą F oraz na elementarnym odcinku ścieżki ds działa
Zgodnie z trzecim prawem Newtona na ciało B działa jednocześnie siła -F, którego składnik styczny -F τ powoduje zmianę wartości liczbowej prędkości ciała. Zgodnie z drugim prawem Newtona

Stąd,
Praca wykonana przez ciało do całkowitego zatrzymania wynosi:

Zatem energia kinetyczna ciała poruszającego się translacyjnie jest równa połowie iloczynu masy tego ciała przez kwadrat jego prędkości:
 (3.7)
(3.7)
Ze wzoru (3.7) wynika, że energia kinetyczna ciała nie może być ujemna ( Ek ≥ 0).
Jeśli system składa się z N stopniowo poruszających się ciał, wówczas aby je zatrzymać należy zahamować każde z tych ciał. Zatem całkowita energia kinetyczna układu mechanicznego jest równa sumie energii kinetycznych wszystkich wchodzących w jego skład ciał:
 (3.8)
(3.8)
Ze wzoru (3.8) wynika, że Ek zależy tylko od wielkości mas i prędkości ruchu ciał w niej zawartych. W tym przypadku nie ma znaczenia, jaka jest masa ciała ja nabrał prędkości ν ja. Innymi słowy, energia kinetyczna układu jest funkcją jego stanu ruchu.
Prędkości ν ja zależą w znacznym stopniu od wyboru układu odniesienia. Wyprowadzając wzory (3.7) i (3.8) założono, że ruch rozpatrywany jest w inercjalnym układzie odniesienia, gdyż w przeciwnym razie nie można by zastosować praw Newtona. Jednak w różnych inercyjnych układach odniesienia poruszających się względem siebie prędkość ν ja I korpus systemu, a w konsekwencji jego Eki a energia kinetyczna całego układu nie będzie taka sama. Zatem energia kinetyczna układu zależy od wyboru układu odniesienia, tj. jest ilość względny.
Energia potencjalna- jest to energia mechaniczna układu ciał, określona przez ich względne położenie i charakter sił interakcji między nimi.
Liczbowo energia potencjalna układu w danym położeniu jest równa pracy, jaką wykonają siły działające na układ podczas przemieszczania układu z tego położenia do takiego, w którym umownie przyjmuje się, że energia potencjalna wynosi zero ( En= 0). Pojęcie „energii potencjalnej” dotyczy wyłącznie układów konserwatywnych, tj. układy, w których praca działających sił zależy wyłącznie od położenia początkowego i końcowego układu. A więc dla ważenia ładunku P, podniesiony na wysokość H, energia potencjalna będzie równa En = Ph (En= 0 o godz H= 0); dla obciążenia przymocowanego do sprężyny, mi n = kΔl 2 / 2, Gdzie Δl- wydłużenie (ściskanie) sprężyny, k– jego współczynnik sztywności ( En= 0 o godz l= 0); dla dwóch cząstek o masach m 1 I m 2, przyciągany przez prawo powszechnego ciążenia,  , Gdzie γ
– stała grawitacyjna, R– odległość między cząstkami ( En= 0 o godz R → ∞).
, Gdzie γ
– stała grawitacyjna, R– odległość między cząstkami ( En= 0 o godz R → ∞).
Rozważmy energię potencjalną układu ziemskiego - ciała masowego M, podniesiony na wysokość H nad powierzchnią Ziemi. Miarą spadku energii potencjalnej takiego układu jest praca sił grawitacyjnych zachodzących podczas swobodnego spadania ciała na Ziemię. Jeśli ciało spada pionowo, to
Gdzie E nie– energia potencjalna układu w H= 0 (znak „-” wskazuje, że praca została wykonana w wyniku utraty energii potencjalnej).
Jeśli to samo ciało spada w dół po nachylonej płaszczyźnie l i pod kątem nachylenia α do pionu ( lcosα = godz), to praca wykonana przez siły grawitacyjne jest równa poprzedniej wartości:
Jeśli w końcu ciało porusza się po dowolnej krzywoliniowej trajektorii, możemy sobie wyobrazić tę krzywą składającą się z N małe proste odcinki Δl ja. Praca wykonana przez siłę grawitacji na każdym z tych odcinków jest równa
Na całej krzywoliniowej drodze praca wykonana przez siły grawitacyjne jest oczywiście równa:
Zatem praca sił grawitacyjnych zależy tylko od różnicy wysokości punktów początkowego i końcowego ścieżki.
Zatem ciało znajdujące się w potencjalnym (konserwatywnym) polu sił ma energię potencjalną. Przy nieskończenie małej zmianie konfiguracji układu praca sił zachowawczych jest równa wzrostowi energii potencjalnej pobieranej ze znakiem minus, ponieważ praca jest wykonywana ze względu na spadek energii potencjalnej:

Z kolei praca dA wyrażony jako iloczyn skalarny siły F przenieść dr, więc ostatnie wyrażenie można zapisać w następujący sposób:
 (3.9)
(3.9)
Dlatego jeśli funkcja jest znana En (r), to z wyrażenia (3.9) można znaleźć siłę F według modułu i kierunku.
Dla sił konserwatywnych
Lub w formie wektorowej

Gdzie
 (3.10)
(3.10)
Nazywa się wektor zdefiniowany wyrażeniem (3.10). gradient funkcji skalarnej P; ja, j, k- wektory jednostkowe osi współrzędnych (ort).
Specyficzny typ funkcji P(w naszym przypadku En) zależy od charakteru pola siłowego (grawitacyjnego, elektrostatycznego itp.), jak pokazano powyżej.
Całkowita energia mechaniczna W układ jest równy sumie jego energii kinetycznej i potencjalnej:

Z definicji energii potencjalnej układu i rozważanych przykładów jasno wynika, że energia ta, podobnie jak energia kinetyczna, jest funkcją stanu układu: zależy jedynie od konfiguracji układu i jego położenia względem do organów zewnętrznych. W konsekwencji całkowita energia mechaniczna układu jest również funkcją stanu układu, tj. zależy tylko od położenia i prędkości wszystkich ciał w układzie.
1) Energia kinetyczna.
Jeśli ciało ma masę M porusza się z prędkością v, to ma energię,
Praca jest równa zmianie energii kinetycznej ciała: ![]() .
.
2) Energia potencjalna.
Dowolne ciało o masie M, pod wpływem grawitacji ma energię: ,
gdzie h jest wysokością nad warunkowym poziomem zerowym, g jest przyspieszeniem swobodnego spadania.
Ciało odkształcone sprężyście ma również energię potencjalną. Jeśli sztywność sprężyny k zdeformowany kwotowo X, to ma energię: ,
 Energia potencjalna to energia oddziaływania pomiędzy ciałami (lub ich częściami).
Energia potencjalna to energia oddziaływania pomiędzy ciałami (lub ich częściami).
Należy pamiętać, że nie każde oddziaływanie ciał charakteryzuje się energią potencjalną. Istnieją siły specjalne, których działanie nie zależy od kształtu trajektorii, ale zależy jedynie od początkowego i końcowego położenia ciał (ryc.). Takie siły nazywane są konserwatywny. Na przykład siły zachowawcze obejmują grawitację i elastyczność, a siły niezachowawcze obejmują tarcie.
Praca jest równa zmianie energii potencjalnej ze znakiem minus:
Jednostką miary energii jest 1 dżul.
Prawo zachowania energii.
Rozważmy konserwatywny układ mechaniczny, tj. system, w którym działają wyłącznie siły konserwatywne.
Prawo zachowania jest sformułowane dla energii całkowitej.
Pełen energii układ mechaniczny to suma energii kinetycznej i potencjalnej ciał wchodzących w skład tego układu: ![]()
Więc, w zamkniętym, konserwatywnym układzie mechanicznym całkowita energia jest zachowana.
Lub, w systemach konserwatywnych, przy braku wpływu zewnętrznego, całkowita energia pozostaje stała.
Często energia potencjalna jest funkcją współrzędnych. Narysujmy wykresy energii całkowitej i energii potencjalnej na jednej płaszczyźnie współrzędnych. Wykres energii potencjalnej może się zwiększać lub zmniejszać, ale wykres energii całkowitej jest poziomy, ponieważ całkowita energia jest stała (w układach konserwatywnych).

ABC to potencjalna dziura.
CDR stanowi potencjalną barierę.
Uderzenie środkową piłką.
Prawa zachowania służą do analizy i rozwiązywania wielu problemów fizycznych, z których jednym jest wpływ ciał.
Uderzyć- zderzenie dwóch lub więcej ciał, w którym oddziaływanie trwa bardzo krótko.
Podczas uderzenia następuje redystrybucja energii i pędu pomiędzy ciałami. W takim przypadku część energii mechanicznej układu może zamienić się w energię niemechaniczną.
Rozważmy ograniczające rodzaje wpływu.
- Uderzenie niesprężyste to uderzenie, po którym ciała poruszają się jako całość, a część energii mechanicznej jest zużywana na odkształcenie i zamienia się w formy niemechaniczne (termiczne). Podczas uderzenia niesprężystego tylko prawo zachowania pędu.
- Uderzenie całkowicie sprężyste to uderzenie, podczas którego energia mechaniczna nie ulega przemianie na inny, niemechaniczny rodzaj energii. Po uderzeniu ciała całkowicie przywracają swój kształt i rozmiar. Całkowita energia układu jest zachowana. Przy absolutnie elastycznym uderzeniu spełnione są również prawa zachowania pędu i energii.
Rozważmy centralne uderzenie dwóch piłek.
Uderzenie nazywa się centralny, jeżeli przed uderzeniem kule poruszają się po linii przechodzącej przez ich środki masy.
Niech masy będą znane m 1, m 2 i prędkość piłek przed uderzeniem: v 1, v 2
Oznaczające „akcję”. Można nazwać energiczną osobą, która się porusza, tworzy określoną pracę, potrafi tworzyć, działać. Maszyny stworzone przez ludzi, istoty żywe i naturę również mają energię. Ale to jest w zwykłym życiu. Ponadto istnieje ścisły, który zdefiniował i wyznaczył wiele rodzajów energii - elektryczną, magnetyczną, atomową itp. Jednak teraz porozmawiamy o energii potencjalnej, której nie można rozpatrywać w oderwaniu od energii kinetycznej.
Energia kinetyczna
Energię tę, zgodnie z koncepcjami mechaniki, posiadają wszystkie ciała, które oddziałują ze sobą. I w tym przypadku mówimy o ruchu ciał.
Energia potencjalna
Ten rodzaj energii powstaje, gdy następuje interakcja ciał lub części jednego ciała, ale nie ma ruchu jako takiego. Jest to główna różnica w stosunku do energii kinetycznej. Na przykład, jeśli podniesiesz kamień nad ziemię i utrzymasz go w tej pozycji, będzie on miał energię potencjalną, która może zamienić się w energię kinetyczną, jeśli kamień zostanie uwolniony.
Energia jest zwykle kojarzona z pracą. Oznacza to, że w tym przykładzie uwolniony kamień może wykonać pewną pracę podczas spadania. A możliwa ilość pracy będzie równa energii potencjalnej ciała na określonej wysokości h. Aby obliczyć tę energię, stosuje się następujący wzór:
A=Fs=Ft*h=mgh lub Ep=mgh, gdzie:
Ep – energia potencjalna ciała,
m - masa ciała,
h to wysokość ciała nad ziemią,
g jest przyspieszeniem swobodnego spadania.
Dwa rodzaje energii potencjalnej
Energia potencjalna ma dwa rodzaje:
1. Energia we względnym położeniu ciał. Zawieszony kamień ma taką energię. Co ciekawe, zwykłe drewno czy węgiel również ma energię potencjalną. Zawierają nieutleniony węgiel, który może się utleniać. Krótko mówiąc, spalone drewno może potencjalnie podgrzać wodę.
2. Energia odkształcenia sprężystego. Przykładami mogą tu być: elastyczna opaska, ściśnięta sprężyna lub układ „kość-mięsień-więzadło”.
Energia potencjalna i kinetyczna są ze sobą powiązane. Mogą się nawzajem przekształcać. Na przykład, jeśli rzucisz kamień w górę, początkowo będzie on miał energię kinetyczną podczas ruchu. Gdy osiągnie pewien punkt, zamarznie na chwilę i nabierze energii potencjalnej, po czym grawitacja ściągnie go w dół i ponownie pojawi się energia kinetyczna.