Для чего нужна механическая энергия. Что такое потенциальная энергия. Формы и виды энергии
1.2.3 Работа сил в механике, энергия. Закон сохранения энергии в механике
Работой постоянной силы F , когда тело движется поступательно и прямолинейно, при прохождении телом пути S, называют величину
Работа, совершаемая силой F на конечном пути s , равна сумме элементарных работ на отдельных бесконечно малых участках пути; эта сумма приводится к интегралу:
Силу F, действующую на материальную точку, называют консервативной , или потенциальной , если работа А , совершаемая этой силой при перемещении точки из одного произвольного положения в другое, не зависит от того, по какой траектории это перемещение произошло. Поэтому при перемещении материальной точки вдоль замкнутой траектории работа консервативной силы тождественно равна нулю. Таким образом, консервативные силы можно определить двумя способами:
1) как силу, работа которой не зависит от пути, по которому частица переходит из одного положения в другое;
2) как силу, работа которой по замкнутому пути равна нулю.
Примерами консервативных сил могут служить силы всемирного тяготения, силы упругости, силы электростатического взаимодействия между заряженными телами.
Все силы, не удовлетворяющие условиюконсервативности, называются неконсервативными. Характерным примером таких сил являются силы трения скольжения. Сила трения скольжения всегда направлена в сторону, противоположную направлению движения, так чтоcosα = -1. Поэтому работа силы трения скольжения вдоль замкнутой траектории всегда отрицательна и никогда не равна нулю.
Для характеристики скорости совершения работы силой вводится понятие мощности. Мощностью N силы F называется физическая величина, численно равная работе, совершаемой этой силой за единицу времени:
где v - скорость точки приложения силы.
В механике различают два вида энергии, кинетическую и потенциальную. Кинетической энергией тела называют энергию Е K , являющуюся мерой его механического движения и измеряемую той работой, которую может совершить тело при его торможении до полной остановки. Найдем выражение для кинетической энергии твердого тела В, имеющего массу т и движущегося поступательно со скоростью v.
Пусть тело В тормозится под действием некоторой силой F (в общем случае переменной) и на малом участке пути ds совершает элементарную работу dА = - F τ ds . По второму закону Ньютона - F τ = mdv / dt Следовательно, dA = - m (dv / dt ) ds = - m (ds / dt ) dv = - m v dv . Работа, совершаемая телом В до полной его остановки
Данная формула справедлива для кинетической энергии материальной точки. Любую механическую систему можно рассматривать как систему материальных точек. Поэтому кинетическая энергия Е K механической системы равна сумме кинетических энергий всех п материальных точек, образующих эту систему:
|
Е к = ∑ Е i = ∑m i v i 2 /2 |
где m i , v i - масса и скорость i -й материальной точки. Таким образом, кинетическая энергия системы полностью определяется величинами масс и скоростей движения. входящих в нее материальных точек. Она не зависит от того, каким образом части рассматриваемой системы приобрели данные значения скоростей. Кратко этот важный вывод можно сформулировать следующим образом: кинетическая энергия системы есть функция состояния ее движения.
Если на систему материальных точек или тел действуют консервативные (потенциальные) силы, то можно ввести понятие потенциальной энергии этой системы. В самом деле, работа, совершаемая консервативными силами, не зависит от того, как было осуществлено это перемещение. Работа А 1-2 при перемещении системы из одной точки пространства, полностью определяется начальной и конечной местоположениями системы. Это можно выразить в форме
|
А 1-2 = Еп 1 – Еп 2 |
где Еп - некоторая функция состояния системы, зависящая только от координат всех материальных точек системы. Эту функцию называют потенциальной энергией системы. Отсюда следует, что работа консервативных сил, действующих на механическую систему, равна убыли потенциальной энергии этой системы. Из определения следует, что потенциальная энергия системы в произвольном состоянии равна работе, совершаемой консервативными силами при переводе системы из одного состояния в другое по условию задачи.
Так, например, работа силы тяжести зависит только от разности высот начальной и конечной точек пути. Сила тяжести тела приложена к его центру тяжести. Поэтому работа силы тяжести при любом движении тела равна произведению этой силы на разность высот начального и конечного положений его центра тяжести. Отсюда следует, что работа силы тяжести вдоль замкнутой траектории центра тяжести тела равна нулю, т. е. что сила тяжести, действительно, является консервативной. Потенциальная энергия тела, поднятого на высоту H над поверхностью Земли равна
Найдем потенциальную энергию упруго деформированного тела. Сила упругости F ynp , как известно из опыта, пропорциональна величине деформации х , т. е. F ynp , = - k х где k - коэффициент упругости, характеризующий упругие свойства тела, а знак минус показывает, что сила упругости направлена в сторону, противоположную направлению деформации: упруго деформированное тело стремится восстановить свои первоначальные форму и размеры.
Элементарная работа, совершаемая силой F ynp при бесконечно малом изменении деформации тела на величину dx равна d А = (F ynp dx ) = - kxdx . Работа этой силы при конечном изменении деформации тела, например, при переводе его из недеформированного состояния (х =0) в состояние, соответствующее деформации х , равна
Полной механической энергией системы называют величину E , равную сумме кинетической и потенциальной энергий этой системы:
|
E = E K + E n . |
Полная механическая энергия системы - функция ее состояния, так как зависит только от координат, скоростей и масс всех малых частей (материальных точек) системы
Найдем условие, которому должна удовлетворять система тел для того, чтобы ее полная механическая энергия не изменялась с течением времени. Если v - скорость i - й материальной точки с массой т и то ее кинетическая энергия E к i = m i v i 2 /2. Изменение этой энергии за малый промежуток времени dt , связанное с изменением скорости v , на dv i = a i dt (а i - ускорение рассматриваемой материальной точки), равно
|
dE к i = m i /2[(dv i , v i ) + (v i ,dv i ,)] = m i (a i dt, v i ,) = (m i а i , v t dt) = (m i а i , dr i ) |
где dr i = v i dt - приращение радиуса-вектора r i , материальной точки. По второму закону Ньютона m i а i = F i + f i , где F i и f i - результирующие, соответственно, консервативных и неконсервативных сил, действующих на i - ю материальную точку. Поэтому
Первая сумма в правой части этого уравнения представляет собой суммарную работу dA , совершаемую всеми консервативными силами за промежуток времени dt . Эта работа равна убыли за то же время dt потенциальной энергии системы
где Е= Е K + Е n - полная механическая энергия системы.
Если внутренние силы взаимодействия между которыми консервативны, а все внешние силы - стационарны и консервативны,такую систему тел (материальных точек) называют консервативной системой ,. Для такой системы dA = d E = 0 и
|
E = E K + E п = const, |
т. е. полная механическая энергия консервативной системы не изменяется с течением времени. Этот закон называют законом сохранения механической энергии . Он справедлив, для замкнутой консервативной системы, т е системы, на которую внешние силы не действуют, а все внутренние силы - консервативны.
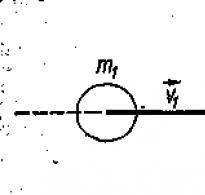
Рассмотрим применение закона сохранения механической энергии к расчету абсолютно упругого прямого центрального удара двух тел. Абсолютно упругим называют такой удар, в результате которого не происходит превращения механической энергии системы соударяющихся тел в другие виды энергии. Пусть два абсолютно упругих шара с массами m 1 и m 2 до удара (рисунок - 1.32, а) движутся поступательно со скоростями v 1 и v 2 , направленными в одну и ту же сторону вдоль линии их центров, причем v 1 > v 2 . Нужно найти скорости шаров u 1 и u 2 после соударения (рисунок - 1.32, б).
|
|
|
|
Рисунок - 1.32 |
|


В процессе удара систему соударяющихся тел можно считать замкнутой. Следовательно, для решения этой задачи можно воспользоваться законами сохранения механической энергии и импульса. Перед ударом и после его завершения соударяющиеся тела не деформированы, т. е. потенциальную энергию системы в этих двух состояниях можно считать одинаковой и равной нулю. Тогда из закона сохранения механической энергии имеем
Совместное решение двух последних уравнений дает
|
u 1 = / (m 1 +m 2 ), u 2 = / (m 1 +m 2 ) |
т.е., после упругого соударения тела двигаются каждая со своей скоростью кинетической энергией Е 1 и Е 2 соответственно.
Систему тел называют диссипативной, если ее механическая энергия постепенно уменьшается за счет преобразования в другие (немеханические) формы энергии. Этот процесс называют процессом диссипации (рассеяния) энергии . В качестве примера рассмотрим диссипацию энергии при абсолютно неупругом прямом центральном ударе двух поступательно движущихся тел.
При абсолютно неупругом ударе происходит диссипация энергии. Изменение ∆ E полной механической энергии системы соударяющихся тел равно изменению их кинетической энергии
После преобразований, рассеянная энергия равна:
|
∆E =- m 1 m 2 (v 1 – v 2 ) 2 /2(m 1 + m 2 ) |
Если тело может совершить механическую работу, то оно обладает механической энергией Е (Дж). Либо, если внешняя сила совершает работу, воздействуя на тело, его энергия изменяется.
Сучествует два вида механической энергии: кинетическая и потенциальная.
Кинетическая энергия – энергия движущихся тел:
где v (м/с) – модуль скорости, m – масса тела.
Потенциальная энергия – энергия взаимодействующих тел.
Примеры потенциальной энергии в механике.
Тело поднято над землей: Е = mgh
где h – высота, определяемая от нулевого уровня (или от нижней точки траектории). Форма траектории не важна, имеет значения только начальная и конечная высота.
Упруго деформированное тело. Деформация, определяемая от положения недеформированного тела (пружины, шнура и т.п.).
Потенциальная энергия упругих тел: , где k – жёсткость пружины; х – её деформация.
Энергия может передаваться от одних тел к другим, а также превращаться из одного вида в другой.
![]() - Полная механическая энергия.
- Полная механическая энергия.
Закон сохранения энергии : в замкнутой системе тел полная энергия не изменяется при любых взаимодействиях внутри этой системы тел.
|
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой посредством сил тяготения и сил упругости, остается неизменной.
2.
Трансформатор. Принцип действия. Устройство. Коэффициент трансформации. Передача электроэнергии.
Преобразование переменного тока, при котором напряжение увеличивается или уменьшается в несколько раз практически без  потери мощности, осуществляется с помощью трансформаторов.
потери мощности, осуществляется с помощью трансформаторов.
Трансформатор - устройство, применяемое для повышения или понижения напряжения переменного тока.
Впервые трансформаторы были использованы в 1878г. русским ученым П.Н.Яблочковым для питания изобретенных им «электрических свечей»- нового в то время источника света.
Простейший трансформатор представляет собой две катушки. Намотанные на общий стальной сердечник. Одна катушка подключается к источнику переменного напряжения. Эта катушка называется первичной обмоткой), а с другой катушки (называемой вторичной обмоткой) снимают переменное напряжение для дальнейшей его передачи.
Переменный ток в первичной обмотке создает переменное магнитное поле. Благодаря стальному сердечнику вторичную обмотку, намотанную на тот же сердечник, пронизывает практически такое же переменное поле, что и первичную.
Поскольку все витки пронизываются одним и тем же переменным магнитным потоком , вследствие явления электромагнитной индукции в каждом витке генерируется одно и то же напряжение . Поэтому отношение напряжений 𝑈 1 и 𝑈 2 первичной и вторичной обмотках равно отношению числа витков в них:
Изменение напряжения трансформатором характеризует коэффициент трансформации
Коэффициент трансформации - величина, равная отношению напряжений в первичной и вторичной обмотках трансформатора:
Повышающий трансформатор- трансформатор, увеличивающий напряжение ( У повышающего трансформатора число витков во вторичной обмотке должно быть больше числа витков в первичной обмотке, т.е. к<1.
Понижающий трансформатор – трансформатор, уменьшающий напряжение ( У понижающего трансформатора число витков во вторичной обмотке должно быть меньше числа витков в первичной обмотке, т. е к>1.
Передача электрической энергии от электростанций до больших городов или промышленных центров на расстояния тысяч километров является сложной научно-технической проблемой. Для уменьшения потерь на нагревания проводов необходимо уменьшить силу тока в линии передачи, и, следовательно, увеличить напряжение. Обычно линии электропередачи строятся в расчете на напряжение 400–500 кВ, при этом в линиях используется трехфазный ток частотой 50 Гц.
Билет № 12
Закон Паскаля. Закон Архимеда. Условия плавания тел.
Формулировка закона Паскаля
Давление, производимое на жидкость или газ, передается в любую точку одинаково во всех направлениях. Это утверждение объясняется подвижностью частиц жидкостей и газов во всех направлениях.
На основе закона Паскаля гидростатики работают различные гидравлические устройства: тормозные системы, прессы и др.
Закон Архимеда - это закон статики жидкостей и газов, согласно которому на тело, погруженное в жидкость (или газ), действует выталкивающая сила (сила Архимеда), равная весу вытесненной этим телом жидкости (или газа).

F A = ρgV,
где ρ
- плотность жидкости (газа),
g
- ускорение свободного падения,
V
- объем погруженного тела (или объем той части тела, которую погрузили в жидкость (или газ)).
Архимедова сила направлена всегда противоположно силе тяжести
. Она равна нулю, если погруженное в жидкость тело плотно, всем основанием прижато ко дну.
Следует помнить, что в состоянии невесомости закон Архимеда не работает
.
В механике различают два вида энергии: кинетическую и потенциальную. Кинетической энергией
называют механическую энергию всякого свободно движущегося тела и измеряют ее той работой, которую могло бы совершить тело при его торможении до полной остановки.
Пусть тело В
, движущееся со скоростью v
, начинает взаимодействовать с другим телом С
и при этом тормозится. Следовательно, тело В
действует на тело С
с некоторой силой F
и на элементарном участке пути ds
совершает работу
По третьему закону Ньютона на тело В одновременно действует сила -F , касательная составляющая которой -F τ вызывает изменение численного значения скорости тела. Согласно второму закону Ньютона

Следовательно,
Работа, совершаемая телом до полной его остановки равна:

Итак, кинетическая энергия поступательно движущегося тела равна половине произведения массы этого тела на квадрат его скорости:
 (3.7)
(3.7)
Из формулы (3.7) видно, что кинетическая энергия тела не может быть отрицательной (E k ≥ 0
).
Если система состоит из n
поступательно движущихся тел, то для ее остановки необходимо затормозить каждое из этих тел. Поэтому полная кинетическая энергия механической системы равна сумме кинетических энергий всех входящих в нее тел:
 (3.8)
(3.8)
Из формулы (3.8) видно, что E k
зависит только от величины масс и скоростей движения, входящих в нее тел. При этом неважно, каким образом тело массой m i
приобрело скорость ν i
. Другими словами, кинетическая энергия системы есть функция состояния ее движения
.
Скорости ν i
существенно зависят от выбора системы отсчета. При выводе формул (3.7) и (3.8) предполагалось, что движение рассматривается в инерциальной системе отсчета, т.к. иначе нельзя было бы использовать законы Ньютона. Однако, в разных инерциальных системах отсчета, движущихся относительно друг друга, скорость ν i
i
-го тела системы, а, следовательно, его E ki
и кинетическая энергия всей системы будут неодинаковы. Таким образом, кинетическая энергия системы зависит от выбора системы отсчета, т.е. является величиной относительной
.
Потенциальная энергия
– это механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Численно потенциальная энергия системы в данном ее положении равна работе, которую произведут действующие на систему силы при перемещении системы из этого положения в то, где потенциальная энергия условно принимается равной нулю (E n
= 0). Понятие «потенциальная энергия» имеет место только для консервативных систем, т.е. систем, у которых работа действующих сил зависит только от начального и конечного положения системы. Так, для груза весом P
, поднятого на высоту h
, потенциальная энергия будет равна E n = Ph
(E n
= 0 при h
= 0); для груза, прикрепленного к пружине, E n = kΔl 2 / 2
, где Δl
- удлинение (сжатие) пружины, k
– ее коэффициент жесткости (E n
= 0 при l
= 0); для двух частиц с массами m 1
и m 2
, притягивающимися по закону всемирного тяготения,  , где γ
– гравитационная постоянная, r
– расстояние между частицами (E n
= 0 при r
→ ∞).
, где γ
– гравитационная постоянная, r
– расстояние между частицами (E n
= 0 при r
→ ∞).
Рассмотрим потенциальную энергию системы Земля – тело массой m
, поднятого на высоту h
над поверхностью Земли. Уменьшение потенциальной энергии такой системы измеряется работой сил тяготения, совершаемой при свободном падении тела на Землю. Если тело падает по вертикали, то
Где E no
– потенциальная энергия системы при h
= 0 (знак «-» показывает, что работа совершается за счет убыли потенциальной энергии).
Если это же тело падает по наклонной плоскости длиной l
и с углом наклона α к вертикали (lcosα = h
), то работа сил тяготения равна прежней величине:
Если, наконец, тело движется по произвольной криволинейной траектории, то можно представить себе эту кривую состоящей из n малых прямолинейных участков Δl i . Работа силы тяготения на каждом из таких участков равна
На всем криволинейном пути работа сил тяготения, очевидно, равна:
Итак, работа сил тяготения зависит только от разности высот начальной и конечной точек пути.
Таким образом, тело в потенциальном (консервативном) поле сил обладает потенциальной энергией. При бесконечно малом изменении конфигурации системы работа консервативных сил равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:

В свою очередь работа dA
выражается как скалярное произведение силы F
на перемещение dr
, поэтому последнее выражение можно записать следующим образом:
 (3.9)
(3.9)
Следовательно, если известна функция E n (r)
, то из выражения (3.9) можно найти силу F
по модулю и направлению.
Для консервативных сил
Или в векторном виде

где
 (3.10)
(3.10)
Вектор, определяемый выражением (3.10), называется градиентом скалярной функции П
; i, j, k
- единичные векторы координатных осей (орты).
Конкретный вид функции П
(в нашем случае E n
) зависит от характера силового поля (гравитационное, электростатическое и т.п.), что и было показано выше.
Полная механическая энергия W
системы равна сумме ее кинетической и потенциальной энергий:

Из определения потенциальной энергии системы и рассмотренных примеров видно, что эта энергия, подобно кинетической энергии, является функцией состояния системы: она зависит только от конфигурации системы и ее положения по отношению к внешним телам. Следовательно, полная механическая энергия системы также является функцией состояния системы, т.е. зависит только от положения и скоростей всех тел системы.
1) Кинетическая энергия.
Если тело массой m движется со скоростью v, то оно обладает энергией ,
Работа равна изменению кинетической энергии тела: ![]() .
.
2) Потенциальная энергия.
Любое тело массы m , находящееся под действием гравитации обладает энергией: ,
где h – высота над условным нулевым уровнем, g – ускорение свободного падения.
Потенциальной энергией так же обладает упруго деформированное тело. Если пружина жесткостью k деформирована на величину x , то она обладает энергией: ,
 Потенциальная энергия это энергия взаимодействия тел (или его частей).
Потенциальная энергия это энергия взаимодействия тел (или его частей).
Отметим, что не всякое взаимодействие тел характеризуется потенциальной энергией. Есть особые силы, работа которых не зависит от формы траектории, а определяется только начальным и конечным положением тел (рис.). Такие силы называют консервативными . Например, к консервативным силам относятся сила тяжести, сила упругости, к неконсервативным – сила трения.
Работа равна изменению потенциальной энергии со знаком минус:
Единица измерения энергии – 1 Джоуль.
Закон сохранения энергии.
Рассмотрим консервативную механическую систему, т.е. такую систему в которой действуют только консервативные силы.
Закон сохранения формулируется для полной энергии.
Полной энергией
механической системы называют сумму кинетических и потенциальных энергий тел, входящих в эту систему: ![]()
Итак, в замкнутой консервативной механической системе полная энергия сохраняется .
Или, в консервативных системах при отсутствии внешнего воздействия полная энергия остается постоянной .
Часто потенциальная энергия является функцией координат. Изобразим на одной координатной плоскости графики полной энергии и потенциальной энергии. График потенциальной энергии может взрастать или убывать, а график полной энергии горизонтален, т.к. полная энергия постоянна (в консервативных системах).

ABC – потенциальная яма.
CDR – потенциальный барьер.
Центральный удар шаров.
Законы сохранения применяются для анализа и решения множества физических задач, одним из которых является удар тел.
Удар – столкновение двух или более тел, при котором взаимодействие длится очень короткое время.
При ударе между телами происходит перераспределение энергий и импульса. При этом часть механической энергии системы может перейти в немеханические.
Рассмотрим предельные виды удара.
- Неупругий удар – удар, после которого тела движутся как единое целое, при этом часть механической энергии тратится на деформацию и переходит в немеханические виды (в тепловую). При неупругом ударе выполняется только закон сохранения импульса.
- Абсолютно упругий удар – удар, при котором механическая энергия не переходит в другие, немеханические, виды энергии. После удара тела полностью восстанавливают формы и размеры. Полная энергия системы сохраняется. При абсолютно упругом ударе выполняются и законы сохранения импульса и энергии.
Рассмотрим центральный удар двух шаров.
Удар называется центральным , если до удара шары движутся вдоль линии, проходящей через их центры масс.
Пусть известны массы m 1 , m 2 и скорости шаров до удара: v 1 , v 2
Обозначающего «действие». Можно назвать энергичным человека, который двигается, создает определенную работу, может творить, действовать. Также энергией обладают машины, созданные людьми, живая и природа. Но это в обычной жизни. Помимо этого, есть строгая , определившая и обозначившая многие виды энергии – электрическую, магнитную, атомную и пр. Однако сейчас речь пойдет о потенциальной энергии, которую нельзя рассматривать в отрыве от кинетической.
Кинетическая энергия
Этой энергией, согласно представлениям механики обладают все тела, которые взаимодействуют друг с другом. И в данном случае речь идет о движении тел.
Потенциальная энергия
В данный вид энергии создается, когда происходит взаимодействие тел или частей одного тела, но при этом нет движения как такового. В этом главное отличие от кинетической энергии. К примеру, если поднять камень над землей и удержать в этом положении, он будет иметь потенциальную энергию, которая может перейти в кинетическую, если камень отпустить.
Обычно энергию связывают с работой. То есть в данном примере отпущенный камень может произвести некоторую работу при падении. А возможная величина работы будет равна потенциальной энергии тела при определенной высоте h. Для вычисления данной энергии применяется следующая формула:
A=Fs=Fт*h=mgh, или Eп=mgh, где:
Eп - потенциальная энергия тела,
m - масса тела,
h - высота тела над поверхностью земли,
g - ускорение свободного падения.
Два вида потенциальной энергии
У потенциальной энергии различается два вида:
1. Энергия при взаимном расположении тел. Такой энергией обладает подвешенный камень. Интересно, но потенциальной энергией обладают и обычные дрова или уголь. В них содержится не окисленный углерод, который может окислиться. Если сказать проще, сгоревшие дрова потенциально могут нагреть воду.
2. Энергия упругой деформации. Для примера здесь можно привести эластичный жгут, сжатую пружину или система «кости-мышцы-связки».
Потенциальная и кинетическая энергия взаимосвязаны. Они могут переходит друг в друга. К примеру, если подбросить камень вверх, при движении сначала он обладает кинетической энергией. Когда он достигнет определенной точки, то на мгновение замрет и получит потенциальную энергию, а затем гравитация потянет его вниз и снова возникнет кинетическая энергия.