Why is mechanical energy needed? What is potential energy. Forms and types of energy
1.2.3 Work of forces in mechanics, energy. Law of conservation of energy in mechanics
Work constant force F, when the body moves translationally and rectilinearly, when the body passes the path S, the quantity is called
Work done by force F on the final path s, equal to the sum of elementary work on individual infinitesimal sections of the path; this sum is reduced to the integral:
Strength F, acting on a material point is called conservative, or potential, if work A, performed by this force when moving a point from one arbitrary position to another, does not depend on the trajectory along which this movement occurred. Therefore, when a material point moves along a closed trajectory, the work done by the conservative force is identically equal to zero. Thus, conservative forces can be defined in two ways:
1) as a force, the work of which does not depend on the path along which the particle moves from one position to another;
2) as a force whose work along a closed path is zero.
Examples of conservative forces are the forces of universal gravitation, the force of elasticity, and the force of electrostatic interaction between charged bodies.
All forces that do not satisfy the conservatism condition are called non-conservative . A typical example of such forces is sliding friction forces. The sliding friction force is always directed in the direction opposite to the direction of movement, so cosα = -1. Therefore, the work of the sliding friction force along a closed trajectory is always negative and never equal to zero.
To characterize the speed of work done by force, the concept of power is introduced. Power N strength F is a physical quantity that is numerically equal to the work done by this force per unit of time:
Where v - speed of the force application point.
In mechanics, there are two types of energy, kinetic and potential. Kinetic energy bodies call energy E K , which is a measure of its mechanical movement and measured by the work that a body can do when it slows down to a complete stop. Let us find an expression for the kinetic energy of a solid body IN, having mass T and moving forward with speed v.
Let the body IN decelerates under the influence of some force F(in the general case a variable) and on a short section of the path ds does elementary work d A= - F τ ds. According to Newton's second law - F τ = mdv/ dt Therefore, dA = - m (dv/ dt) ds = - m (ds/ dt) dv = - m v dv. Work done by the body IN until it stops completely
This formula is valid for the kinetic energy of a material point. Any mechanical system can be considered as a system of material points. Therefore the kinetic energy E K mechanical system is equal to the sum of the kinetic energies of all P material points forming this system:
|
E To = ∑ E i = ∑m i v i 2 /2 |
Where m i , v i- mass and speed i th material point. Thus, the kinetic energy of the system is completely determined by the values of the masses and velocities of motion. the material points included in it. It does not depend on how the parts of the system under consideration acquired these velocity values. Briefly, this important conclusion can be formulated as follows: the kinetic energy of a system is a function of the state of its motion.
If a system of material points or bodies is acted upon by conservative (potential) forces, then the concept of potential energy of this system can be introduced. In fact, the work done by conservative forces does not depend on how this movement was carried out. Job A 1-2 when moving the system from one point in space, it is completely determined by the initial and final system locations . This can be expressed in the form
|
A 1-2 = Ep 1 – Ep 2 |
Where Ep - a certain function of the state of the system, depending only on the coordinates of all material points of the system. This function is called potential energy systems. It follows that the work done by conservative forces acting on a mechanical system is equal to the decrease in the potential energy of this system. From the definition it follows that the potential energy of a system in an arbitrary state is equal to the work done by conservative forces when transferring the system from one state to another according to the conditions of the problem.
For example, the work of gravity depends only on the difference in heights of the starting and ending points of the path. The force of gravity of a body is applied to its center of gravity. Therefore, the work done by gravity during any movement of a body is equal to the product of this force and the difference in heights of the initial and final positions of its center of gravity. It follows that the work of gravity along a closed trajectory of the center of gravity of the body is equal to zero, i.e., that the force of gravity is indeed conservative. Potential energy of a body raised to a height H above the Earth's surface is equal to
Let's find the potential energy of an elastically deformed body. Elastic force F ynp, as is known from experience, is proportional to the magnitude of the deformation X, i.e. F ynp , = - kX Where k - elasticity coefficient characterizing the elastic properties of the body, and the minus sign indicates that the elasticity force is directed in the direction opposite to the direction of deformation: an elastically deformed body tends to restore its original shape and size.
Elementary work done by force F ynp with an infinitesimal change in the deformation of the body by the amount dx equal to dA = (F ynp dx) = - kxdx. The work of this force during a finite change in the deformation of the body, for example, when transferring it from an undeformed state ( X=0) to a state corresponding to deformation X, is equal
Full mechanical energy systems call the quantity E, equal to the sum of the kinetic and potential energies of this system:
|
E = E K + E n . |
The total mechanical energy of a system is a function of its state, since it depends only on the coordinates, velocities and masses of all small parts (material points) of the system
Let us find the condition that a system of bodies must satisfy in order for its total mechanical energy not to change over time. If v- speed i- th material point with mass T And then its kinetic energy E To i = m i v i 2 /2. Change in this energy over a short period of time dt, associated with speed change v, on dv i = a i dt (A i- acceleration of the considered material point), is equal to
|
dE To i = m i /2[(dv i ,v i ) + (v i ,dv i ,)] = m i (a i dt,v i ,) = (m i A i , v t dt) =(m i A i , dr i ) |
Where dr i = v i dt- radius vector increment r i , material point. According to Newton's second law m i A i = F i + f i , Where F i And f i - resulting, respectively, from conservative and non-conservative forces acting on i- yu material point. That's why
The first sum on the right side of this equation represents the total work dA, accomplished by all conservative forces over a period of time dt. This work is equal to the loss for the same time dt potential energy of the system
Where E= E K + E n - total mechanical energy of the system.
If the internal forces of interaction between which are conservative, and all external forces are stationary and conservative, such a system of bodies (material points) is called conservative system,. For such a system dA = dE = 0 And
|
E = E K + E P= const, |
that is, the total mechanical energy of a conservative system does not change over time. This law is called law of conservation of mechanical energy. He is fair for closed conservative system, that is, a system on which external forces do not act, and all internal forces are conservative.
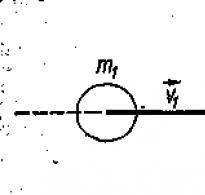
Let us consider the application of the law of conservation of mechanical energy to the calculation of an absolutely elastic direct central impact of two bodies. Absolutely elastic called such an impact, as a result of which there is no conversion of the mechanical energy of the system of colliding bodies into other types of energy. Let two absolutely elastic balls with masses m 1 And m 2 before impact (Figure - 1.32, A) moving forward at speeds v 1 And v 2 , directed in the same direction along the line of their centers, and v 1 > v 2 . We need to find the speed of the balls u 1 And u 2 after impact (Figure - 1.32, b).
|
|
|
|
Figure - 1.32 |
|


During the impact process, the system of colliding bodies can be considered closed. Therefore, to solve this problem, we can use the laws of conservation of mechanical energy and momentum. Before the impact and after its completion, the colliding bodies are not deformed, i.e., the potential energy of the system in these two states can be considered the same and equal to zero. Then from the law of conservation of mechanical energy we have
A joint solution of the last two equations gives
|
u 1 = / (m 1 +m 2 ), u 2 = / (m 1 +m 2 ) |
i.e., after an elastic collision, the bodies each move with their own speed and kinetic energy E 1 And E 2 respectively.
A system of bodies is called dissipative if its mechanical energy gradually decreases due to conversion into other (non-mechanical) forms of energy. This process is called process dissipation(scattering) energy. As an example, consider the energy dissipation at absolute inelastic direct central impact of two progressively moving bodies.
In a completely inelastic collision, dissipation energy. Change ∆ E total mechanical energy of a system of colliding bodies is equal to the change in their kinetic energy
After transformations, the dissipated energy is:
|
∆E =- m 1 m 2 (v 1 – v 2 ) 2 /2(m 1 + m 2 ) |
If a body can perform mechanical work, then it has mechanical energy E(J). Or, if an external force does work by acting on the body, its energy changes.
There are two types of mechanical energy: kinetic and potential.
Kinetic energy - energy of moving bodies:
Where v(m/s) – velocity module, m – body mass.
Potential energy– energy of interacting bodies.
Examples of potential energy in mechanics.
The body is raised above the ground: E = mgh
where h is the height determined from the zero level (or from the lowest point of the trajectory). The shape of the trajectory is not important, only the initial and final heights matter.
Elastically deformed body. Deformation determined from the position of an undeformed body (spring, cord, etc.).
Potential energy of elastic bodies: , where k is the spring stiffness; x is its deformation.
Energy can be transferred from one body to another, and also transformed from one type to another.
![]() - Total mechanical energy.
- Total mechanical energy.
Law of energy conservation: V closed full body system energy doesn't change during any interactions within this system of bodies.
|
The sum of kinetic and potential energy of bodies that make up a closed system and interact with each other through gravitational and elastic forces remains unchanged.
2.
Transformer. Operating principle. Device. Transformation coefficient. Electricity transmission.
AC conversion, in which the voltage increases or decreases several times with virtually no  power loss is carried out using transformers.
power loss is carried out using transformers.
Transformer- a device used to increase or decrease alternating current voltage.
Transformers were first used in 1878. Russian scientist P.N. Yablochkov to power the “electric candles” he invented, a new light source at that time.
The simplest transformer consists of two coils. Wound on a common steel core. One coil connects to the source variable voltage. This coil is called primary winding), and from the other coil (called secondary winding) remove the alternating voltage for its further transmission.
Alternating current in the primary winding creates an alternating magnetic field. Thanks to the steel core, the secondary winding, wound on the same core, is penetrated by almost the same variable field as the primary one.
Because everything turns are penetrated the same alternating magnetic flux, due to the phenomenon of electromagnetic induction in every turn generated same voltage. Therefore, the ratio of voltages 𝑈 1 and 𝑈 2 of the primary and secondary windings is equal to the ratio of the number of turns in them:
The change in voltage by a transformer characterizes the transformation ratio
Transformation ratio - a value equal to the ratio of voltages in the primary and secondary windings of the transformer:
Boosting transformer - a transformer that increases voltage (In a step-up transformer, the number of turns in the secondary winding must be greater than the number of turns in the primary winding, i.e.<1.
Downward transformer - a transformer that reduces the voltage (In a step-down transformer, the number of turns in the secondary winding must be less than the number of turns in the primary winding, i.e. k>1.
The transmission of electrical energy from power plants to large cities or industrial centers over distances of thousands of kilometers is a complex scientific and technical problem. To reduce losses due to heating of wires, it is necessary to reduce the current in the transmission line, and, consequently, increase the voltage. Typically, power transmission lines are built for voltages of 400–500 kV, and the lines use three-phase current with a frequency of 50 Hz.
Ticket number 12
Pascal's law. Archimedes' law. Sailing conditions tel.
Formulation of Pascal's law
The pressure produced on a liquid or gas is transmitted to any point the same in all directions. This statement is explained by the mobility of particles of liquids and gases in all directions.
Various hydraulic devices operate on the basis of Pascal's law of hydrostatics: brake systems, presses, etc.
Archimedes' Law is the law of statics of liquids and gases, according to which a body immersed in a liquid (or gas) is acted upon by a buoyant force (Archimedes’ force) equal to the weight of the liquid (or gas) displaced by this body.

F A = ρgV,
Where ρ
- density of liquid (gas),
g - acceleration of gravity,
V - the volume of an immersed body (or the volume of that part of the body that is immersed in a liquid (or gas)).
Archimedes' force is directed always opposite to gravity. It is equal to zero if a body immersed in a liquid is dense, with its entire base pressed to the bottom.
It should be remembered that In a state of weightlessness, Archimedes' law does not work.
In mechanics, there are two types of energy: kinetic and potential. Kinetic energy call the mechanical energy of any freely moving body and measure it by the work that the body could do when it slows down to a complete stop.
Let the body IN, moving at speed v, begins to interact with another body WITH and at the same time it slows down. Therefore the body IN affects the body WITH with some force F and on the elementary section of the path ds does work
According to Newton's third law, body B is simultaneously acted upon by a force -F, the tangent component of which -F τ causes a change in the numerical value of the body's speed. According to Newton's second law

Hence,
The work done by the body until it comes to a complete stop is:

So, the kinetic energy of a translationally moving body is equal to half the product of the mass of this body by the square of its speed:
 (3.7)
(3.7)
From formula (3.7) it is clear that the kinetic energy of a body cannot be negative ( Ek ≥ 0).
If the system consists of n progressively moving bodies, then to stop it it is necessary to brake each of these bodies. Therefore, the total kinetic energy of a mechanical system is equal to the sum of the kinetic energies of all bodies included in it:
 (3.8)
(3.8)
From formula (3.8) it is clear that Ek depends only on the magnitude of the masses and speeds of movement of the bodies included in it. In this case, it does not matter how the body mass m i gained speed ν i. In other words, the kinetic energy of a system is a function of its state of motion.
Speeds ν i depend significantly on the choice of reference system. When deriving formulas (3.7) and (3.8), it was assumed that the motion is considered in an inertial reference frame, since otherwise Newton's laws could not be used. However, in different inertial reference systems moving relative to each other, the speed ν i i th body of the system, and, consequently, its Eki and the kinetic energy of the entire system will not be the same. Thus, the kinetic energy of the system depends on the choice of the reference frame, i.e. is the quantity relative.
Potential energy- this is the mechanical energy of a system of bodies, determined by their relative position and the nature of the interaction forces between them.
Numerically, the potential energy of a system in its given position is equal to the work that will be done by the forces acting on the system when moving the system from this position to the one where the potential energy is conventionally assumed to be zero ( E n= 0). The concept of “potential energy” applies only to conservative systems, i.e. systems in which the work of the acting forces depends only on the initial and final positions of the system. So, for a load weighing P, raised to a height h, the potential energy will be equal En = Ph (E n= 0 at h= 0); for a load attached to a spring, E n = kΔl 2 / 2, Where Δl- elongation (compression) of the spring, k– its stiffness coefficient ( E n= 0 at l= 0); for two particles with masses m 1 And m 2, attracted by the law of universal gravitation,  , Where γ
– gravitational constant, r– distance between particles ( E n= 0 at r → ∞).
, Where γ
– gravitational constant, r– distance between particles ( E n= 0 at r → ∞).
Let's consider the potential energy of the Earth system - a body of mass m, raised to a height h above the surface of the Earth. The decrease in the potential energy of such a system is measured by the work of gravitational forces performed during the free fall of a body to the Earth. If a body falls vertically, then
Where E no– potential energy of the system at h= 0 (the “-” sign indicates that the work is done due to the loss of potential energy).
If the same body falls down an inclined plane of length l and with an angle of inclination α to the vertical ( lcosα = h), then the work done by the gravitational forces is equal to the previous value:
If, finally, the body moves along an arbitrary curvilinear trajectory, then we can imagine this curve consisting of n small straight sections Δl i. The work done by the gravitational force on each of these sections is equal to
Along the entire curvilinear path, the work done by the gravitational forces is obviously equal to:
So, the work of gravitational forces depends only on the difference in heights of the starting and ending points of the path.
Thus, a body in a potential (conservative) field of forces has potential energy. With an infinitesimal change in the configuration of the system, the work of conservative forces is equal to the increase in potential energy taken with a minus sign, since the work is done due to the decrease in potential energy:

In turn, work dA expressed as the dot product of force F to move dr, so the last expression can be written as follows:
 (3.9)
(3.9)
Therefore, if the function is known E n (r), then from expression (3.9) we can find the force F by module and direction.
For conservative forces
Or in vector form

Where
 (3.10)
(3.10)
The vector defined by expression (3.10) is called gradient of the scalar function P; i, j, k- unit vectors of coordinate axes (orts).
Specific type of function P(in our case E n) depends on the nature of the force field (gravitational, electrostatic, etc.), as was shown above.
Total mechanical energy W system is equal to the sum of its kinetic and potential energies:

From the definition of the potential energy of a system and the examples considered, it is clear that this energy, like kinetic energy, is a function of the state of the system: it depends only on the configuration of the system and its position in relation to external bodies. Consequently, the total mechanical energy of the system is also a function of the state of the system, i.e. depends only on the position and velocities of all bodies in the system.
1) Kinetic energy.
If the body has a mass m moves with speed v, then it has energy,
Work is equal to the change in kinetic energy of the body: ![]() .
.
2) Potential energy.
Any body of mass m, under the influence of gravity has energy: ,
where h is the height above the conditional zero level, g is the acceleration of free fall.
An elastically deformed body also has potential energy. If the spring stiffness k deformed by the amount x, then it has the energy: ,
 Potential energy is the energy of interaction between bodies (or its parts).
Potential energy is the energy of interaction between bodies (or its parts).
Note that not every interaction of bodies is characterized by potential energy. There are special forces, the work of which does not depend on the shape of the trajectory, but is determined only by the initial and final positions of the bodies (Fig.). Such forces are called conservative. For example, conservative forces include gravity and elasticity, and non-conservative forces include friction.
Work is equal to the change in potential energy with a minus sign:
The unit of energy measurement is 1 Joule.
Law of energy conservation.
Let us consider a conservative mechanical system, i.e. a system in which only conservative forces operate.
The conservation law is formulated for total energy.
Full of energy a mechanical system is the sum of the kinetic and potential energies of the bodies included in this system: ![]()
So, in a closed conservative mechanical system the total energy is conserved.
Or, in conservative systems, in the absence of external influence, the total energy remains constant.
Often potential energy is a function of coordinates. Let us draw graphs of total energy and potential energy on one coordinate plane. The potential energy graph can increase or decrease, but the total energy graph is horizontal, because the total energy is constant (in conservative systems).

ABC is a potential hole.
CDR is a potential barrier.
Center ball strike.
Conservation laws are used to analyze and solve many physical problems, one of which is the impact of bodies.
Hit- a collision of two or more bodies in which the interaction lasts a very short time.
During an impact, a redistribution of energy and momentum occurs between bodies. In this case, part of the mechanical energy of the system can turn into non-mechanical energy.
Let's consider the limiting types of impact.
- Inelastic impact is an impact after which the bodies move as a single whole, while part of the mechanical energy is spent on deformation and turns into non-mechanical forms (thermal). During an inelastic impact, only law of conservation of momentum.
- Absolutely elastic impact is an impact in which mechanical energy does not transform into other, non-mechanical, types of energy. After the impact, the bodies completely restore their shape and size. The total energy of the system is conserved. With an absolutely elastic impact, the laws of conservation of momentum and energy are also satisfied.
Consider the central impact of two balls.
The blow is called central, if before the impact the balls move along a line passing through their centers of mass.
Let the masses be known m 1, m 2 and the speed of the balls before impact: v 1 , v 2
Denoting "action". You can call an energetic person who moves, creates certain work, can create, act. Machines created by people, living things and nature also have energy. But this is in ordinary life. In addition, there is a strict one that has defined and designated many types of energy - electric, magnetic, atomic, etc. However, now we will talk about potential energy, which cannot be considered in isolation from kinetic energy.
Kinetic energy
This energy, according to the concepts of mechanics, is possessed by all bodies that interact with each other. And in this case we are talking about the movement of bodies.
Potential energy
This type of energy is created when there is an interaction between bodies or parts of one body, but there is no movement as such. This is the main difference from kinetic energy. For example, if you lift a stone above the ground and hold it in this position, it will have potential energy, which can turn into kinetic energy if the stone is released.
Energy is usually associated with work. That is, in this example, the released stone can produce some work as it falls. And the possible amount of work will be equal to the potential energy of the body at a certain height h. To calculate this energy, the following formula is used:
A=Fs=Ft*h=mgh, or Ep=mgh, where:
Ep - potential energy of the body,
m - body weight,
h is the height of the body above the ground,
g is the acceleration of free fall.
Two types of potential energy
Potential energy has two types:
1. Energy in the relative position of bodies. A suspended stone has such energy. Interestingly, ordinary wood or coal also has potential energy. They contain unoxidized carbon that can oxidize. To put it simply, burnt wood can potentially heat up the water.
2. Energy of elastic deformation. Examples here include an elastic band, a compressed spring, or a “bone-muscle-ligament” system.
Potential and kinetic energy are interrelated. They can transform into each other. For example, if you throw a stone up, it initially has kinetic energy as it moves. When it reaches a certain point, it will freeze for a moment and gain potential energy, and then gravity will pull it down and kinetic energy will arise again.